



基于稀疏探测车辆数据的大规模网络交通在线估计与预测
摘要
基于探测车辆数据的网络交通预测对于交通管理和路线推荐具有重要意义,并已得到广泛研究。以往的交通预测方法主要关注常发性交通拥堵。然而,由事件和事故引起的非经常性交通拥堵的预测更为重要,但尚未得到充分研究。为了利用探针车辆数据预测非经常性交通拥堵,我们需要基于稀疏观测对大规模交通网络进行当前交通状况的估计,以在线跟踪交通变化在线。传统交通预测方法无法同时解决上述所有问题。
为应对这些问题,我们提出一种结合道路网络拓扑结构的状态空间神经网络(SSNN)数据同化方法。SSNN模型能够简便地建模网络流量,并可通过贝叶斯滤波进行数据同化,有效估计其状态和参数。在本研究中,我们采用基于解耦扩展卡尔曼滤波(DEKF)的数据同化方法,该方法具有可扩展性,适用于大规模网络交通,可实现状态和参数的在线估计。我们使用一个包含超过30000个道路路段的道路网络的开放数据集对所提出的方法进行评估。结果表明,与传统状态估计方法相比,我们的方法在预测未知交通拥堵方面具有更高的预测精度,并且对数据稀疏性更具鲁棒性。
索引术语 —数据同化,解耦扩展卡尔曼滤波,状态空间神经网络,交通速度预测。
一、引言
TRAFFIC 状态预测,即对未来交通速度、密度或行程时间的估计,在交通管理和路线推荐系统中具有重要作用,三十多年来一直受到广泛关注[1]。近年来,基于GPS探测车辆的预测方法被深入研究,因为这些车辆相比环形检测器能够覆盖更广的区域。最近,基于深度学习技术的交通拥堵预测方法也被广泛研究。其中大多数方法聚焦于可通过历史数据学习到的常发性交通拥堵。然而,由事件和事故引起的非经常性交通拥堵对于交通管理和路线推荐更为重要。预测
稿件于2019年6月3日收到;2020年1月12日、2020年8月3日和2021年2月10日修订;2021年3月11日接受。本文的副编辑是W. J. Jin。(通讯作者:田口俊。)作者单位:丰田中央研发实验室有限公司,日本名古屋市长久手市480‐1192(电子邮件:s‐taguchi@mosk.tytlabs.co.jp; yoshimura@mosk.tytlabs.co.jp)。数字对象标识符 10.1109/TITS.2021.3067603
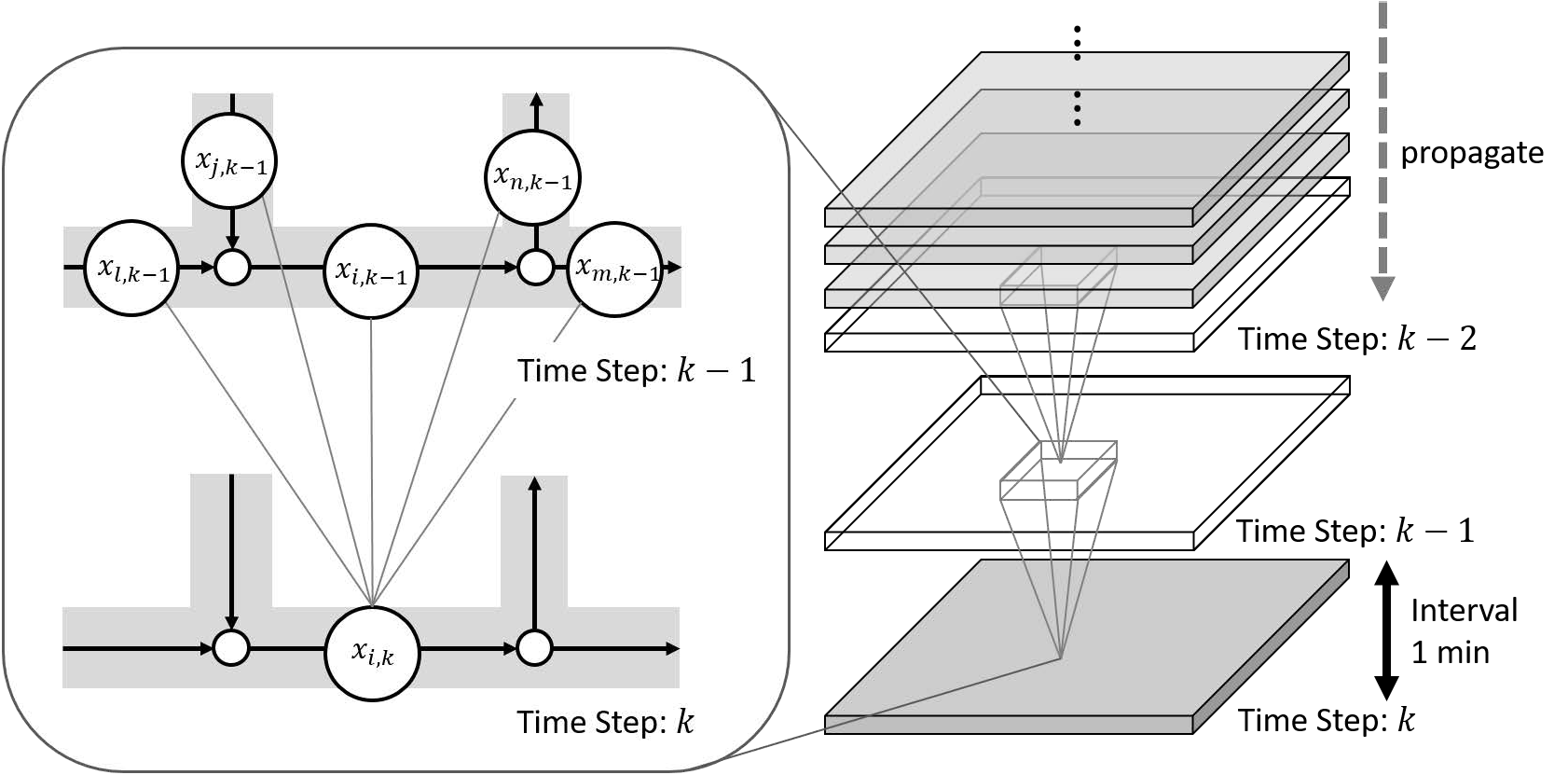
提出的结合道路网络拓扑结构的SSNN模型。状态xi,k依赖于所有相连的道路路段的先前状态以及其自身的前一状态。时间步长间隔设置较短(1分钟),并通过多层短时预测实现长期预测。
基于探针车辆数据的非经常性交通拥堵极其具有挑战性,原因如下三个问题。(1) 从稀疏GPS数据中估计当前边状态:如果我们能够获得充足的探测数据,则可以轻松估计每条边的状态。然而,如果探测数据稀疏,则必须在时间和空间上对信息进行插值;(2) 大规模网络流量的短期预测:应使用能够不仅考虑网络连接,而且适用于大规模网络的预测模型来预测未来状态;(3) 在线跟踪交通变化:为了预测非经常性交通拥堵的状态,模型需要足够灵活,通过在线学习适应由事件和事故引起的不断变化的交通状况。
我们尝试通过采用结合道路网络拓扑结构的状态空间神经网络(SSNN)模型进行数据同化,利用稀疏数据实现准确预测和在线学习。机器学习模型需要大量数据,难以在稀疏数据条件下进行在线学习。宏观交通模型等状态空间模型可以通过数据同化方法实现系统在线识别;然而,常用的交通流模型的预测性能通常较低。SSNN模型兼具机器学习模型和状态空间模型的特性,因此SSNN模型具有神经网络模型的高表达潜力,并且其参数可以通过数据同化方法在线估计。
提出的预测模型如图1所示。我们对SSNN模型进行增强,以融合道路网络的拓扑结构;每个节点对应一条道路路段的状态取决于其自身前一状态以及所有相连道路路段的先前状态。该方法通过使用相邻边进行多层短时预测,实现长期预测。传统的宏观交通模型会因城市交通的微观现象而产生误差;然而,所提出的方法能够通过参数的顺序学习来减少此类误差。当将所提出的SSNN模型应用于大规模路网时,参数和状态的数量变得非常大。由于方差矩阵的维度变得非常高,简单的数据同化方法(如扩展卡尔曼滤波器(EKF))无法跟踪这些参数和状态。因此,我们采用一种适用于高维数据的贝叶斯滤波方法,即解耦扩展卡尔曼滤波(DEKF)[2],进行数据同化。DEKF是 EKF在高维模型上的近似方法,其假设某些权重估计之间的相互作用可以忽略。DEKF足够快速,能够在实时条件下估计大规模道路网络的交通状态,并且可以并行处理。
我们工作的主要贡献总结如下: 我们提出了一种新颖的SSNN模型,该模型融合了道路网络拓扑结构。所提出的模型具有神经网络模型的高表达潜力,其参数可通过数据同化方法在线估计。引入道路网络拓扑结构还使我们能够对非常大规模的道路网络进行建模。
我们采用基于解耦扩展卡尔曼滤波器(DEKF)的数据同化方法,利用稀疏探针车辆数据实时估计所提出模型的状态和模型参数。通过使用数据同化在线学习模型参数,该模型能够适应非经常性交通拥堵。
我们通过使用ICDM 2010竞赛中的开放数据集[3]对所提出的方法进行了评估。为了评估非经常性交通拥堵的预测性能,我们在比ICDM 2010竞赛更具挑战性的任务上进行了评估,该任务在不使用历史数据的情况下进行。结果表明,与传统状态估计方法相比,所提出的方法在预测非经常性交通拥堵方面具有更高的精度以及更强的对稀疏性的鲁棒性。
本文的其余部分组织如下。第二节回顾了相关研究,并讨论了与本研究的相似性和差异性。第三节介绍了基于SSNN的网络流量模型。第四节描述了用于估计所提出交通模型的状态和参数的数据同化方法。第五节展示了实验结果。最后,第七节对全文进行总结。
II. 相关工作
在引言中,我们识别出提出了从稀疏探针车辆数据中预测非经常性交通拥堵相关的三个问题。传统方法仅解决了其中部分问题。估计方法侧重于
表I 各种方法解决的问题。为了利用探测数据预测非经常性交通拥堵,我们需要基于大规模交通网络的稀疏观测在线估计当前交通状况,以跟踪交通变化
仅针对第一个问题。机器学习方法,如基于深度学习的方法,主要关注第二个问题。然而,这些方法大多需要密集的探测数据或外部真实数据进行训练,因此在缺乏足够训练数据的情况下表现不佳。一些研究人员提出了一种基于稀疏探针车辆数据的学习方法[36]–[38];然而,该方法无法跟踪交通状态的变化。基于数据同化的方法采用宏观交通模型(如CTM),主要解决第三个问题。这些方法未考虑数据的稀疏性,且无法应用于大规模网络交通。表I总结了各种方法及其所解决的问题。每种方法将在后续章节中进行更详细的回顾。
A. 估计方法
估计方法主要关注从稀疏的GPS数据[4]–[10]中估计边状态。然而,若不利用动态信息,则需要从稀疏的 GPS坐标中获取道路路段状态的额外信息。因此,已有许多基于探针车辆数据、依赖将路径行程时间分解为单个道路路段的估计算法被提出[6]–[9]。当车辆行驶经过多个路段时,其延误发生的位置未知,这种情况下进行分解可能导致不准确。该问题在[36]中也已被讨论。本研究仅使用探针车辆数据中的瞬时速度。由于瞬时速度信息只能在探测车辆当前行驶的道路路段上获取,因此其空间分布是稀疏的。本文提出的方法通过建模相邻道路路段之间的动态关系来解决这一问题。Wanget al. [10]提出了一种结合行程时间推断、上下文感知的张量分解以及利用动态规划进行最优拼接的方法。此外,他们指出路径行程时间不能简单地通过对各路段行程时间求和来估计。在其方法中,可通过不仅考虑各路段的行程时间,还考虑轨道模式组合的子路径估计来修正分解过程,从而实现路线行程时间的估计。尽管估计方法能够估计
根据稀疏的探测数据,他们无法预测未来的交通速度或行程时间状态。
B. 机器学习方法
机器学习方法侧重于交通状态的短期预测。许多相关研究未考虑GPS数据的稀疏性影响,其研究对象通常为车流量较大的高速公路或小型路网[11]–[13]。利用环形检测器进行短期预测的研究已有三十多年历史[1]。早期主要研究经典时间序列方法,包括自回归积分移动平均( ARIMA)模型[14]–[17]及其扩展版本[18]–[20]。在经典时间序列方法之后,多种机器学习方法被应用于交通预测。
已提出的各种方法包括k‐NN 基于[21], 、局部线性回归 基于[22],和贝叶斯网络基于[23]的方法。其中应用最广泛的一种两种方法是神经网络[24]和支持向量回归(SVR) [25],,相关研究综述见[26]。SSNN 是一种神经网络模型的变体,它将神经网络作为状态空间模型的系统模型。
Lint et al. 提出了基于 SSNN 的方法[27]及其在线学习解决方案[28],用于高速公路行程时间预测。
在当前十年中,基于深度学习的方法已被广泛研究。一些研究采用了深度置信网络[29],[30]和堆叠自编码器 [31],[32]。部分研究将时空信息引入深度学习方法中。Ma et al.提出了一种利用卷积神经网络(CNN)的方法,将交通状态视为图像[33]。Wang et al.提出了一种基于循环神经网络的方法,将其引入基于CNN的交通预测[34]。Yu et al.提出了时空图卷积网络[35]。这些方法考虑了探测数据的使用;然而,它们的假设条件比本研究密集得多,因为其学习过程需要精确的交通状态。
机器学习方法主要关注可以从历史数据中捕捉到的周期性交通拥堵;因此,使用这些方法很难预测非周期性交通拥堵。
C. 稀疏学习方法
一些研究人员提出了针对稀疏探针车辆数据的学习方法。A. 霍夫莱特纳et al.[36]提出了一种基于动态贝叶斯网络模型的模型。该模型假设每个道路路段的状态要么是拥堵,要么是非拥堵,然后使用基于仿真的期望最大化 (EM)方法进行参数估计。Jenelius和Koutsopoulos [37]提出了一种基于空间移动平均(SMA)的模型以及基于最大似然的估计方法。该方法利用基于SMA的模型来估计相邻道路路段之间的关系。此外,他们还提出了一种概率主成分分析(PCA)模型,以应对GPS探针数据的稀疏性[38],,其中所有参数均通过EM算法进行训练。尽管这些基于数据驱动方法的
历史数据虽然能够提高预测精度和对稀疏性的鲁棒性,但在跟踪交通流中未出现在历史数据中的变化时面临困难。因此,使用这些方法难以预测非经常性交通拥堵。我们的方法能够利用数据同化方法在线调整模型参数,以适应变化的交通状况。
D. 数据同化方法
数据同化是一种用于同时估计状态和模型参数的有效方法,能够跟踪交通流的变化。此前已有研究探讨了针对交通流的数据同化方法[39]–[47]。例如,Work et al.[39]提出了一种改进的CTM和基于集合卡尔曼滤波的数据同化方法。然而,这些方法大多采用宏观交通流模型,并且仅应用于高速公路。有关高速公路交通估计方法的综述见[48]。
城市和乡村道路的交通受到路径选择、交通信号以及其他微观环境因素的影响,而宏观交通流模型并未考虑这些因素。基于SSNN的提出模型可轻松应用于大规模网络交通,其参数可通过包含各种环境因素影响的流式数据进行训练。
III. 基于SSNN的交通建模
本研究旨在利用稀疏探针车辆数据,预测大规模路网中每个道路路段上的车辆平均速度。目标道路网络是一个有向图 G(N,E),其中 N 是节点集合,E 是表示道路路段的边的集合(见图2)。每条道路路段 ε ∈ E 具有两个属性:速度限制 ε.vmax,以及包含其自身的相连道路路段集合 ε.connect。
第i个道路路段上的车辆在时间步k的平均速度用xi,k表示。状态xk=[x1,k,···,x|E|,k] T是所有道路路段平均速度的向量。观测值yk表示在一个采样间隔内获取的所有探针车辆的速度。交通速度预测问题是指利用观测值y k+h来预测状态y1:k={y1,···,yk},其中该观测值表示从时间步1到时间步k的探针车辆速度,h为预测时域。
我们将该交通模型建模为以下状态空间模型:
$$
x_k= f(x_{k−1})+ u_k, \quad y_k= H_kx_k+ v_k, \quad (1)
$$
其中,xk 和 yk 的元素通过各道路路段的速度限制进行归一化,f 为系统模型,uk 为系统误差,Hk 为观测模型, vk 为观测误差。此处,Hk 可建模为一个矩阵,其元素在有浮动车辆行驶于该路段时为 1,否则为 0。假设观测值已通过地图匹配映射到道路路段。
在本研究中,系统模型 f被建模为一个两层神经网络模型(即,它没有任何隐藏层):
$$
f(x_{k−1})= \phi(Wx_{k−1}+ b), \quad (2)
$$
其中,W是神经网络权重参数的矩阵,b是神经网络偏置参数的向量, ϕ为激活函数。然而,W的维度会非常高,因其等于道路路段数量的平方。因此,我们将道路网络拓扑结构引入神经网络的连接中,如图1所示。在道路网络中不相连的道路路段,在该神经网络中也不相连。这一假设意味着影响沿道路连接传递,当时间步长间隔设置为较小值(例如1分钟)时,该假设被认为是合理的。通过重复使用此短时预测模型,可实现较长时间的预测。模型参数 W表示从每个相连路段产生的影响的大小,模型参数 b为偏置因子。通过训练模型参数,该模型有望拟合真实交通状态。通过引入此假设,我们可以将状态空间模型重写为
$$
x_{i,k}= \phi \left(\sum_{j \in J_i} w_{ij} x_{j,k−1}+ b_i \right)+ u_{i,k},
y_k=\sum_i H_{i,k}x_{i,k}+ v_k, \quad J_i={j |ε_j ∈ ε_i.connect}, \quad (3)
$$
其中,xi,k表示道路路段 εi在k时刻的状态,wij是W中的元素,ui,k是与xi相关的系统误差,Hi是道路路段 εi的观测模型。此外,Ji是连接到 εi的道路路段集合。引入以下记号:xJ i,k −1表示由集合{xj,k−1|j ∈Ji},构成的向量,wiJi表示由集合{wij |j ∈Ji}构成的向量。因此,(3)可重写为
$$
x_{i,k}= \phi(w^T_{iJ_i} x_{J_i,k−1}+ b_i)+ u_{i,k} ,
y_k=\sum_i H_{i,k} x_{i,k}+ v_k. \quad (4)
$$
Road network defined as a directed graph. 每个节点代表一个交叉口或拐角;每条边代表节点之间的道路路段。
所提状态空间模型的动态网络。 观测仅从探测车辆在每一步行驶的边上获得。
图3展示了该状态空间模型的动态网络。该模型可被视为一种没有输入层的循环神经网络(埃尔曼网络),并且其中隐藏层与输出层之间的权重是已知且时变的。
我们使用以下Sigmoid函数作为激活函数。
$$
\phi(a)= \frac{1}{1+ \exp(−a)} , \quad (5)
$$
其中a表示任意变量。由于Sigmoid函数的取值范围仅为0到1,因此各道路路段的状态和观测值均通过其速度限制进行归一化处理。
IV. 数据同化
在本研究中,状态xk和参数W以及b通过数据同化进行估计。数据同化是一种利用贝叶斯滤波同时在线估计状态和参数的方法,贝叶斯滤波是一种递归贝叶斯估计方法,由重复执行预测和更新步骤组成。在预测步骤中,状态xk通过前一状态xk−1和系统模型p(xk| xk−1)进行预测:
$$
p(x_k|y_{1:k−1})=\int p(x_k|x_{k−1})p(x_{k−1}|y_{1:k−1})dx_{k−1}, \quad (6)
$$
其中 y1:k=y1,···,yk。在 update步骤中,状态 xk 的后验概率通过观测值 yk 和观测模型 p(yk| xk) 进行更新:
$$
p(x_k|y_{1:k}) \propto p(y_k|x_k)p(x_k|y_{1:k−1}). \quad (7)
$$
通过重复这些预测和更新 步骤来进行估计。在估计之后,可以通过重复预测 步骤h次来预测第k+h步的状态。
可以利用包含参数的扩展状态空间模型,通过通用贝叶斯滤波进行数据同化。我们将(4)中的状态空间模型转换为扩展状态空间模型。
$$
x’
{i,k}=
\begin{bmatrix}
x
{i,k} \
w_{iJ_i,k} \
b_{i,k}
\end{bmatrix}
=
\begin{bmatrix}
\phi(w^T_{iJ_i,k−1} x_{J_i,k−1}+ b_{i,k−1}) \
w_{iJ_i,k−1} \
b_{i,k−1}
\end{bmatrix}
+ u’
{i,k} ,
y_k=\sum_i H’
{i,k} x’_{i,k}+ v_k , \quad (8)
$$
其中x′i,k=[xi,k wiTJi,kbi,k]T是扩展状态向量,wiJi,k和bi,k分别表示在时间步k时的wiJi和bi,u′i,k是扩展系统误差,而 H′i,k是扩展观测模型。
然后,我们将贝叶斯滤波应用于该模型。我们引入解耦扩展卡尔曼滤波器(DEKF)[2]来估计x′i,k。DEKF是 扩展卡尔曼滤波器(EKF)的一种近似方法,适用于高维模型,并假设某些权重估计之间的相互作用可以忽略。我们使用DEKF分别估计每个道路路段 εi的扩展状态空间向量x′i,k的后验分布。DEKF假设后验分布p(x′i,k|y1:k)为高斯分布 N(ˆx′i,k|k, P′i,k|k),其中 ˆx′i,k|k为均值,P′i,k|k为协方差矩阵。在DEKF中,预测步骤如下进行
$$
\hat{x}’
{i,k|k−1}= f’_i(\hat{x}’
{J_i,k−1|k−1})
=
\begin{bmatrix}
\phi(\hat{w}^T_{iJ_i,k−1|k−1} \hat{x}
{J_i,k−1|k−1}+ \hat{b}
{i,k−1|k−1}) \
\hat{w}
{iJ_i,k−1|k−1} \
\hat{b}
{i,k−1|k−1}
\end{bmatrix},
P’
{i,k|k−1}=\sum
{j \in J_i} F’
{ij,k} P’
{j,k−1|k−1}F’^T_{ij,k}+ Q’
i,
F’
{ij,k}= \frac{\partial f’
i}{\partial x’
{j,k−1|k−1}} \bigg| , \quad (9)
$$
其中 F′ij,k是 f′i关于 x′j,k−1|k−1的雅可比矩阵,Q′i是系统误差 u′i,k的协方差矩阵,且假设u′i,k的均值为0。在更新步骤中,使用观测值yk对分布进行更新。
$$
e_k= y_k −\sum_i H’
i,k \hat{x}’
{i,k|k−1},
S_k=\sum_i H’
i,k P’
{i,k|k−1} H’^T_{i,k}+ R_k,
K_{i,k}= P’
{i,k|k−1} H’^T
{i,k} S^{-1}
k,
\hat{x}’
{i,k|k}= \hat{x}’
{i,k|k−1}+ K
{i,k}e_k,
P’
{i,k|k}=(I − K
{i,k} H’
i,k)P’
{i,k|k−1}, \quad (10)
$$
其中 Rk是观测误差 vk的协方差矩阵,且假设vk的均值为 0。此外,Ki,k通常称为卡尔曼增益,I表示单位矩阵。因此,后验分布p(x′i,k|y1:k)通过迭代执行预测和更新步骤来估计。
然而,(10)式中观测向量 yk 的维度等于探针车辆的数量,过大以至于无法计算 S^{-1}
k 。因此,我们将 yk 按各路段上的探针车辆拆分为观测值 yi,k。然后依次对每个路段 εi 执行 更新 步骤 εi。
$$
e
{i,k}= y_{i,k} − H’
{ii,k} \hat{x}’
{i,k|k−1},
S_{i,k}= H’
{ii,k} P’
{i,k|k−1} H’^T_{ii,k} + R_{i,k} ,
K_{ii,k}= P’
{i,k|k−1} H’^T
{ii,k} S^{-1}
{i,k},
\hat{x}’
{i,k|k}= \hat{x}’
{i,k|k− 1}+ K
{ii,k} e_{i,k} ,
P’
{i,k|k}=(I − K
{i,k} H’
{ii,k}) P’
{i,k|k− 1} , \quad (11)
$$
其中H′ii,k为分段观测模型,Ri,k为分段观测误差。预测和更新步骤的计算可采用并行处理。因此,该方法可轻松应用于大规模网络。
V. 实验结果
A. 数据集
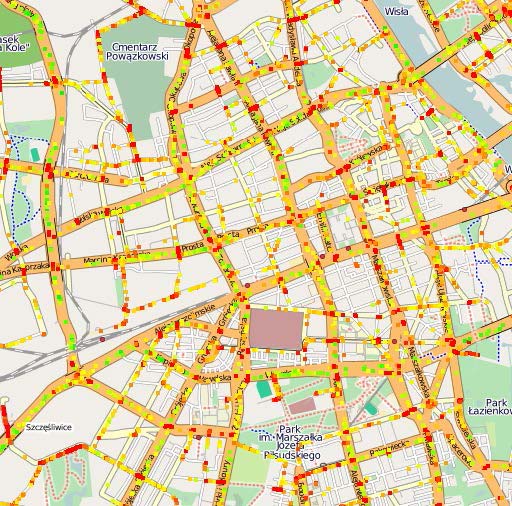
在评估中,我们使用了IEEE ICDM 2010竞赛[3],所使用的开放数据集中的GPS任务数据集,该数据集包含微观交通仿真(见图4)。在GPS任务中,算法接收一个 GPS流,该流由带有时间戳和瞬时速度的位置的纬度和经度坐标组成;算法需预测选定的道路路段在未来30分钟内的交通速度。输入数据包括每10秒发送一次的1%车辆的通知流。GPS任务利用基于历史探测数据和真实数据训练的机器学习方法来预测选定道路路段的平均速度。然而,在本研究中,我们在不使用历史数据或真实数据的情况下在线进行预测。我们使用了该数据集中的街道图和训练数据。
街道图由一个文件中的两种类型的信息组成。
- 节点:–节点ID:街道图中每个节点的唯一标识–纬度–经度
- 边:
–节点1 ID:路段起点的节点ID–节点2 ID:路段终点的节点ID–距离 [km]:路段长度–车道数: 路段内的车道数量–平均最大速度 [km/h]:表示自由驾驶速度的仿真参数,近似等于该路段的速度限制
交通仿真框架:用于生成IEEE ICDM 竞赛数据集的微观交通仿真器[3]。该模拟器模拟波兰华沙的交通情况。道路网络包含18716个节点和35170条边。
道路网络 G(N,E)由街道图数据构建;包含18716个节点和 35170条边。
训练数据 由两个文件组成:从车辆获取的数据流和选定道路路段的实际平均速度数据。流数据具有以下属性:
- 时间戳 [s]:从一个仿真周期开始起的时间
- 车辆ID:在给定的仿真中,每辆车具有唯一的车辆ID
- 速度 [km/h]:车辆在某一秒的瞬时速度
- 纬度 经度
流数据不包含相应的道路路段;因此,我们使用先前提出的在线地图匹配方法 [49] 将流数据映射到道路路段,作为预处理步骤。该方法能够区分上下游交通流。下一小节提供了地图匹配方法的概述。
另一个文件包含关于100个选定道路路段的实际平均速度数据。平均速度数据具有以下属性:
- 时间戳 [s]:从一个仿真周期开始起的时间
- 节点2 ID:道路路段第二个节点(终点)的ID
- 节点1 ID:道路路段第一个节点(起点)的ID
- 速度 [公里/小时]:在时间戳前6分钟内通过或进入给定路段的汽车速度的调和平均数
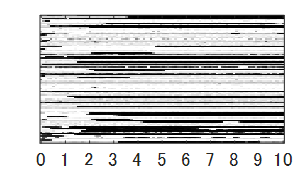
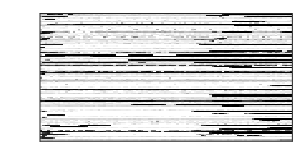
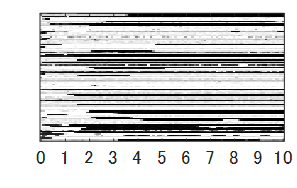
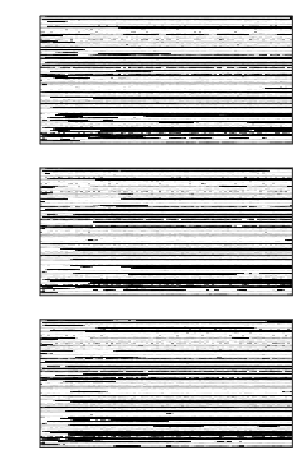
每个数据集中所选道路路段的平均速度如图5所示。尽管每个数据集的特征不同,但我们仍可以看出,在所有数据中,某些道路路段均出现了交通拥堵。
ICDM竞赛中GPS任务的目标是利用街道数据和平均速度数据训练一些机器学习方法来预测交通速度。ICDM竞赛的获胜者使用了随机森林,这是一种机器学习方法[3]。
 –(e))
–(e))
每个数据集选定的道路路段上的实际速度 (a)–(e)。 道路路段上的交通拥堵以深色显示。
相比之下,本研究仅使用流数据进行交通预测,而无需任何离线训练。评估过程中使用道路路段的平均速度数据作为真实数据。本研究的任务比ICDM竞赛中的GPS任务更具挑战性,主要体现在以下两个方面:(1)无法获得道路路段平均速度数据的真实数据,因此我们只能利用 GPS数据流来估计这些数据;(2)该任务不仅需要预测选定道路路段上的速度,还需要预测所有道路路段上的速度,因为该方法无法获取关于选定道路路段的特定信息。这一假设比ICDM竞赛中的假设更加合理,因为在没有安装传感器的道路路段上,通常无法获得车辆平均速度的准确数据。
此外,在本研究中,我们通过下采样流式数据,评估了所提出方法在不同采样间隔下的稀疏性性能。采样间隔对稀疏性的鲁棒性在GPS数据通信成本方面具有重要意义。图6展示了不同采样间隔下观测的稀疏性,显示了6分钟内观测到的边和车辆数量。其中,“# Observed edges” 表示至少有一辆被观测车辆经过的边的数量。被观测到的边少于所有边的10%;因此,在6分钟内超过90%的边未被观测到。所提出的方法仅基于这些稀疏探针车辆数据来估计和预测未来的交通状态。
B. 地图匹配
所提出的方法需要将GPS探针数据映射到道路路段。为此,我们使用了之前提出的地图匹配方法[49]。在该方法中,每条道路路段的匹配概率按如下方式计算:
$$
p(r_k|g_{1:k}) \propto p(g_k|r_k)p(r_k|g_{1:k−1}),
\propto p(g_k|r_k)\sum_{r_{k−1}} p(r_k|r_{k−1})p(r_{k−1}|g_{1:k−1}), \quad (12)
$$
其中,rk表示车辆在k时刻所行驶的道路路段,g1:k是车辆收集的k个GPS数据点的序列。p(rk|rk−1)为路径预测概率,可通过历史数据进行训练。在本研究中,我们使用了一个未训练模型,其中车辆以等概率随机选择一条相连道路作为下一路段。该算法根据第k步之前估计的匹配结果−1来预测第k步的匹配概率,然后利用第k步的实际GPS观测进行更新。该方法通过多假设跟踪对获取的GPS探针数据进行时间序列追踪,从而将包含行驶方向的GPS探针数据映射到道路路段上。
C. 设置
首先,步长时间间隔设置为1分钟,即在神经网络的一层中预测1分钟后的交通速度。模拟器中的GPS探针数据每10至60秒可获取一次;然而,我们假设每一步观测到的是累积了1分钟的数据。
系统误差的协方差矩阵Q′i是时间不变的,归一化平均速度的系统误差方差设为0.01²,,学习过程中模型参数的系统误差方差设为0.1²。引入模型参数误差的原因是为了跟踪交通状态的变化。观测误差的方差(即观测误差协方差矩阵R的对角元素)为(30/ε.vmax)²[km²/h²]。观测误差的方差被设置为较大值,因为估计的状态未包含交通信号灯的状态,该较大的方差能够吸收绿灯和红灯之间出现的较大速度差异。
除了设置这些参数外,还需要设定状态和参数的初始值。状态xi,0(即道路路段上的平均速度)的初始值被设为 1.0(即速度限制),方差被设为10.0²。如果该道路路段未发生拥堵,则车辆可以按速度限制行驶;因此,该初始值是一个合理的设定。此外,我们还需要设定参数wij,0 和 bi,0 的初始值(即先验分布)。参数wij表示相连道路路段 εj的前一状态对当前道路路段 εi当前状态的影响。根据经验,二者之间存在正相关关系。相连道路路段影响的大小未知;我们为每个道路路段的所有相连道路路段定义了相同的先验分布。因此,参数wij,0 和 bi,0 的初始值被设定为
$$
w_{ij,0}= \frac{4.0}{N_{J_i}}, \quad b_{i,0}= -2.0, \quad (13)
$$
其中NJ i表示与道路路段 εi相连的道路路段数量(即N J_i = |εi.connect|)。常数值的设置使得Sigmoid函数趋近于线性函数g(a)= a。参数的初始方差设置为1.0²。该初始参数设置提高了参数训练的速度,这已在上一次评估中得到验证。
D. 结果
我们的模拟器模拟了波兰华沙的交通情况,并从约1%的车辆中获取了GPS数据。
五个数据集作为IEEE ICDM竞赛GPS任务的示例数据发布,每个包含10小时的模拟数据。我们将所提出方法的性能与以下四种基线方法进行了比较。
- 速度限制:使用道路路段的速度限制进行估计。
- 简单平均:基于6分钟内观测到的GPS探测车辆平均速度进行预测。如果某路段没有车辆数据,则使用其速度限制进行估计。
- 移动平均:基于1小时内观测到的GPS探针车辆的平均速度进行预测。如果某路段没有车辆数据,则使用其速度限制进行估计。
- 卡尔曼滤波器:使用恒定速度模型(即xi,k= xi,k−1+ ui,k)进行预测和卡尔曼滤波。初始状态和系统误差与所提出方法相同。
我们将我们的方法与这些简单的估计方法进行了比较,因为目前没有更好的传统方法能够在无需划分技术的情况下,利用稀疏GPS数据实时估计和预测如此大规模的网络流量状况。
使用预测值的均方根误差(RMSE)对解进行了评估:
$$
RMSE=\sqrt{\frac{1}{n}\sum\left( \frac{60}{v_{gt}} - \frac{60}{\max{v_{est}, 0.6}} \right)^2 }, \quad (14)
$$
其中n为数据点的数量, v_gt为真实数据的速度, v_est为估计速度。该方程表示道路路段每1公里预测行程时间的均方根误差,单位为分钟。在此评估中,估计速度的下限设置为0.6 km/h,等于真实数据中的最小速度。
图7和表II展示了不同预测时域和采样间隔下的预测精度,其中均方根误差(RMSE)是使用数据的后半部分 (5小时)计算得出的,因为参数在数据的前半部分尚未充分估计。这些结果表明,所提出的方法在所有条件下均实现了最佳精度,特别是对于稀疏数据表现出显著更高的性能。即使在最短的采样间隔(10秒)下,该方法相比卡尔曼滤波器也能将均方根误差降低15%,相比移动平均降低30%。所提出方法在30分钟预测时域和10秒采样间隔下的均方根误差为9.18 分钟/公里,该精度已接近ICDM竞赛优胜者(约7 分钟/公里)的水平,而后者使用了基于真实数据的离线训练。图7还显示,当采样间隔增加时,将道路路段视为独立的传统方法精度显著下降,而所提出的方法仍能保持较高的精度。在1分钟采样间隔下,所提出方法的均方根误差比其他方法低40%。这是因为所提出的方法利用了相邻道路路段之间的预测模型。
不同采样间隔下观测的稀疏性。
提出的方法的预测精度。 左图显示了在30秒采样间隔下每个预测时域的预测精度,右图显示了在30分钟预测时域下每个采样间隔的预测精度。
表II 不同预测时域和采样间隔的预测精度
表III 每一步(1分钟)的计算时间为[ms/步],采用最密集设置(即10秒采样间隔)
并且一个观测值有助于对相邻道路路段状态的估计。该结果表明,所提出的方法对于稀疏数据特别有效。
图8显示了采样间隔为30秒时预测精度的时序结果。该图表明,所提出方法在估计和预测方面的精度通常高于其他方法。可以看出,1小时预测的精度随时间逐渐提高。这可归因于模型通过在线训练提高了预测精度。然而,在情况(d)中,精度有所下降,可能是由于途中出现了大的交通变化。尽管如此,与传统方法相比,这种变化并未导致性能显著下降。
接下来,我们展示所提出方法的效率。表III总结了所提出方法在每一步的计算时间,该结果是在最密集设置 (即10秒采样间隔)下评估的。该算法在Visual Studio平台上使用C#实现,实验结果通过一台配备3.50吉赫 Intel Core i7‐4770K处理器和32GB内存的计算机的单核计算得出。
并且一个观测值有助于对相邻道路路段状态的估计。该结果表明,所提出的方法对于稀疏数据特别有效。
采样间隔为30秒的预测精度时序结果。左侧显示估计结果,右侧显示1小时预测结果。子图(a)–(e)显示了五个交通模拟数据集的预测精度,以均方根误差衡量。
接下来,我们展示所提出方法的效率。表III总结了所提出方法在每一步的计算时间,该结果是在最密集设置 (即10秒采样间隔)下评估的。该算法在Visual Studio平台上使用C#实现,实验结果通过一台配备3.50吉赫 Intel Core i7‐4770K处理器和32GB内存的计算机的单核计算得出。这些结果表明,所提出的方法所需的计算时间约为卡尔曼滤波状态估计的10倍。然而,所提出的方法仍可实现实时运行,因为它可以在约300毫秒内完成一个算法步骤(即处理1分钟的数据)。这些结果仅与估计状态和参数所需的计算时间相关。要预测h分钟后(即当预测 horizon 为h时)的交通状态,需要额外进行h次prediction步骤。
接下来,我们进行了消融研究,通过评估线性和非线性模型之间的差异以及使用与不使用数据同化方法之间的差异,来展示所提出方法的有效性。为此,我们评估了以下两种方法。
-
LR+DKF(w/ DA)
:该方法使用线性回归模型而非神经网络。它与所提模型相同,但没有基于Sigmoid的激活函数。
-
SSNN+DEKF(w/o DA)
:该方法不涉及数据同化。解耦扩展卡尔曼滤波器(DEKF)仅估计状态而不估计参数,即参数是不变的。
在LR+DKF (w/ DA)中,模型参数的初始值设置为wij, 0= 1.0/NJ i,bi,0= 0.0。这些初始值表示相连道路路段之间的平均速度。我们引入这些设置是为了使初始模型接近所提出的方法。
模型和数据同化的有效性。展示了所提出方法(SSNN+DEKF (w/ DA))、线性模型(LR+DKF(w/DA))以及无数据同化的非线性模型(SSNN+DEKF(w/o DA))之间准确率的差异。
图9所示结果表明,模型和数据同化对于提高精度都非常重要。LR+DKF(含DA)的精度明显较差,甚至低于速度限制。线性回归模型与神经网络的Sigmoid函数不同,没有边界限制,因此预测值可能远大于1.0,从而导致发散在估计中,当使用修正线性单元(ReLU)时也观察到了这一点。具有上下界限制的激活函数(例如,Sigmoid函数)对于防止发散非常重要。
SSNN+DEKF(无DA)的精度也很差,几乎与速度限制相当。初始参数不足以预测真实交通状况;需要通过数据同化进行参数训练以使模型适应真实交通。基于解耦扩展卡尔曼滤波器(DEKF)的数据同化可以在线实时估计出合适的参数。
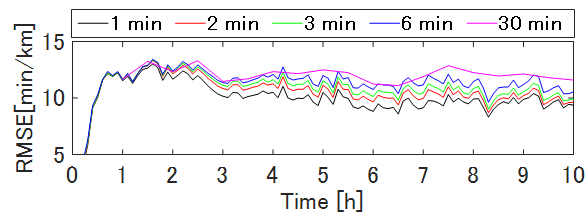
接下来,我们评估多层SSNN(图10)的有效性。该图显示了在不同时间步长间隔(1、2、3、6和30分钟)下,五个数据集的平均均方根误差(RMSE),其中RMSE是基于30秒采样间隔对30分钟预测进行评估的。结果表明,具有较短时间步长间隔(即更多层数)的SSNN相对更准确。我们认为,具有较短间隔的SSNN能够学习快速的交通变化;尽管该模型结构简单,仅能考虑直接相连道路,但通过多层预测可以间接考虑较远的道路。图10的结果支持了这一推论。
多层SSNN的有效性。 在30秒采样间隔下,针对五个数据集在不同时间步长间隔(1、2、3、6和30分钟)进行30分钟预测的平均均方根误差比较。
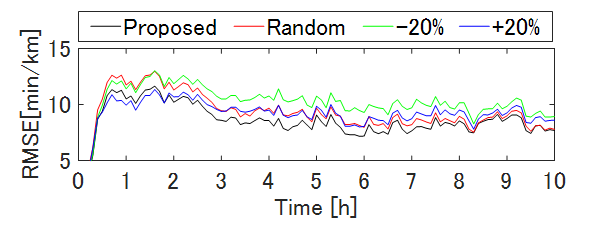
最后,我们通过与均匀随机初始化方法进行比较,来评估所提方法在(13)中的初始参数设置,即wij,0 ∼ U(0,1),bi,0 ∼ −U(0, 1),其中U(0,1)表示0到1之间的均匀分布。此外,我们通过将初始值变化 ±20%,评估其对初始值的敏感性。两种初始化方式在估计中的评估结果如图11所示。该图展示了五种数据集在不同初始参数下的平均均方根误差,其中均方根误差是针对10秒采样间隔的估计结果进行评估的。参数训练的速度使用所提出的初始参数设置后得到了改进。这是因为该设置增强了相连的道路路段之间的相关性,并扩散了观测的影响。可以认为,初始值越接近0,这种扩散效应被抑制得越多,学习速度也越慢。这一点可以从图11中初始值设为 −20%时结果较差得到验证。

初始参数设置的敏感性分析。 将式(13)中的初始参数设置与随机设置及 ±20%设置进行比较,其中均方根误差通过10秒采样间隔的估计结果进行评估。
VI. 讨论
A. 限制
所提出的方法可应用于任何连接结构已知的网络。它仅需要一个网络结构和一种在线地图匹配方法(例如[49]),以分别将GPS数据映射到上下游道路。此外,使用该方法无需进行离线训练。在初始阶段,交通速度的预测可以达到与卡尔曼滤波器相同的估计精度。由于除了道路网络拓扑外无法引入有关交通环境的先验知识,初始估计精度可能较低。然而,该方法能够顺序学习并逐步提高其精度。这也意味着在服务启动时数据不足的情况下,该方法仍可有效使用。但是,如果道路结构发生变化,则必须重置估计,因为从不同道路结构训练得到的参数无法通用。此外,所提出的方法主要关注非经常性交通拥堵。由于当前方法仅考虑前一步骤变化的累积,因此无法提前预测诸如早高峰等常规事件的长期趋势。
B. 应用于实时路径选择
通过使用该方法,可以估计每条道路的未来交通速度。这可以应用于实时路由系统。特别是,利用诸如带时间因素的A*算法之类的路径搜索技术,在由地图匹配估计出的当前位置与用户输入的目的地之间进行路径规划,并将预测的交通速度作为路径的成本。与传统方法相比,我们的方法可以为出行者提供更准确的到达时间和更优的路径。
VII. 结论
本文提出了一种基于SSNN的交通模型和利用稀疏探针车辆数据,针对大规模路网基于解耦扩展卡尔曼滤波器(DEKF)的数据同化方法进行非常发性交通速度预测。所提出的基于SSNN的交通模型将道路网络拓扑结构作为神经元之间的连接。基于DEKF的数据同化能够利用稀疏探针车辆数据实时估计大规模交通的状态和模型参数,从而使模型能够适应非经常性交通拥堵。
我们使用ICDM 2010竞赛[3]的开放数据集对我们的方法进行了评估,用于无需离线训练的非周期性交通预测。结果表明,与10秒采样间隔的卡尔曼滤波方法相比,我们的方法可将道路路段行程时间的均方根误差降低15%。对于30分钟的预测时域,我们的方法性能接近ICDM竞赛优胜者水平,尽管我们的方法未使用真实数据进行任何离线训练。此外,对低采样率数据的评估显示,所提出的方法在面对稀疏性时显著比传统估计方法更具鲁棒性。在1分钟采样间隔下,所提方法的均方根误差比其他方法低40%;这可能是因为该方法在相邻道路路段之间具有预测模型。
对效率的评估表明,所提方法能够实时处理超过30000个道路路段。此外,该方法可通过并行处理实现扩展。由于我们的方法仅需稀疏探针车辆数据即可实时估计和预测交通状态,因此有望提升实时路径推荐系统等应用的效果。


















 609
609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









