#include<opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp> //SIFT SURF
#include<iostream>
#include<vector>
constexpr auto path0 = "11.jpg";
constexpr auto path1 = "22.jpg";
int main() {
cv::Mat image0 = cv::imread(path0, 1);
cv::Mat image1 = cv::imread(path1, 1);
cv::imshow("image0", image0);
cv::imshow("image1", image1);
/*
step1:特征检测器
*/
cv::Ptr<cv::xfeatures2d::SURF> detector;
detector = cv::xfeatures2d::SURF::create(800); //800为海塞矩阵阈值,越大越精准
/*
-----SURF----
cv::Ptr<cv::xfeatures2d::SURF> detector;
detector = cv::xfeatures2d::SURF::create(800); //800为海塞矩阵阈值,越大越精准
-----SIFT-----
cv::Ptr<cv::xfeatures2d::SIFT> detector;
detector = cv::xfeatures2d::SIFT::create(800);//800为保留的点数
-----ORB------
cv::Ptr<cv::ORB> detector;
detector = cv::ORB::create(800);//保留点数
-----STAR-----
cv::Ptr<cv::xfeatures2d::StarDetector> detector;
detector = cv::xfeatures2d::StarDetector::create();
-----MSD-----
cv::Ptr<cv::xfeatures2d::MSDDetector> detector;
detector = cv::xfeatures2d::MSDDetector::create();
*/
std::vector <cv::KeyPoint > key0;
std::vector <cv::KeyPoint > key1;
detector->detect(image0, key0, cv::noArray());
detector->detect(image1, key1, cv::noArray());
/*
step2:描述子提取器
*/
cv::Ptr<cv::xfeatures2d::SURF> Extractor;
Extractor = cv::xfeatures2d::SURF::create(800);
/*
以下都是xfeature2d中的提取器
-----SURF-----
-----SIFT-----
-----LUCID----
-----BriefDescriptorExtractor----
-----VGG-----
-----BoostDesc-----
*/
cv::Mat descriptor0, descriptor1;
Extractor->compute(image0, key0, descriptor0);
Extractor->compute(image1, key1, descriptor1);
/*
step3:匹配器
*/
cv::BFMatcher matcher;//暴力匹配器
std::vector<cv::DMatch> matches; // 存放匹配结果
std::vector<cv::DMatch> good_matches; //存放好的匹配结果
matcher.match(descriptor0, descriptor1, matches);
std::sort(matches.begin(), matches.end()); //筛选匹配点,根据match里面特征对的距离从小到大排序
int ptsPairs = std::min(50, (int)(matches.size() * 0.15));
std::cout << "匹配点数为" << ptsPairs << std::endl;
for (int i = 0; i < ptsPairs; i++)
{
good_matches.push_back(matches[i]); //距离最小的50个压入新的DMatch
}
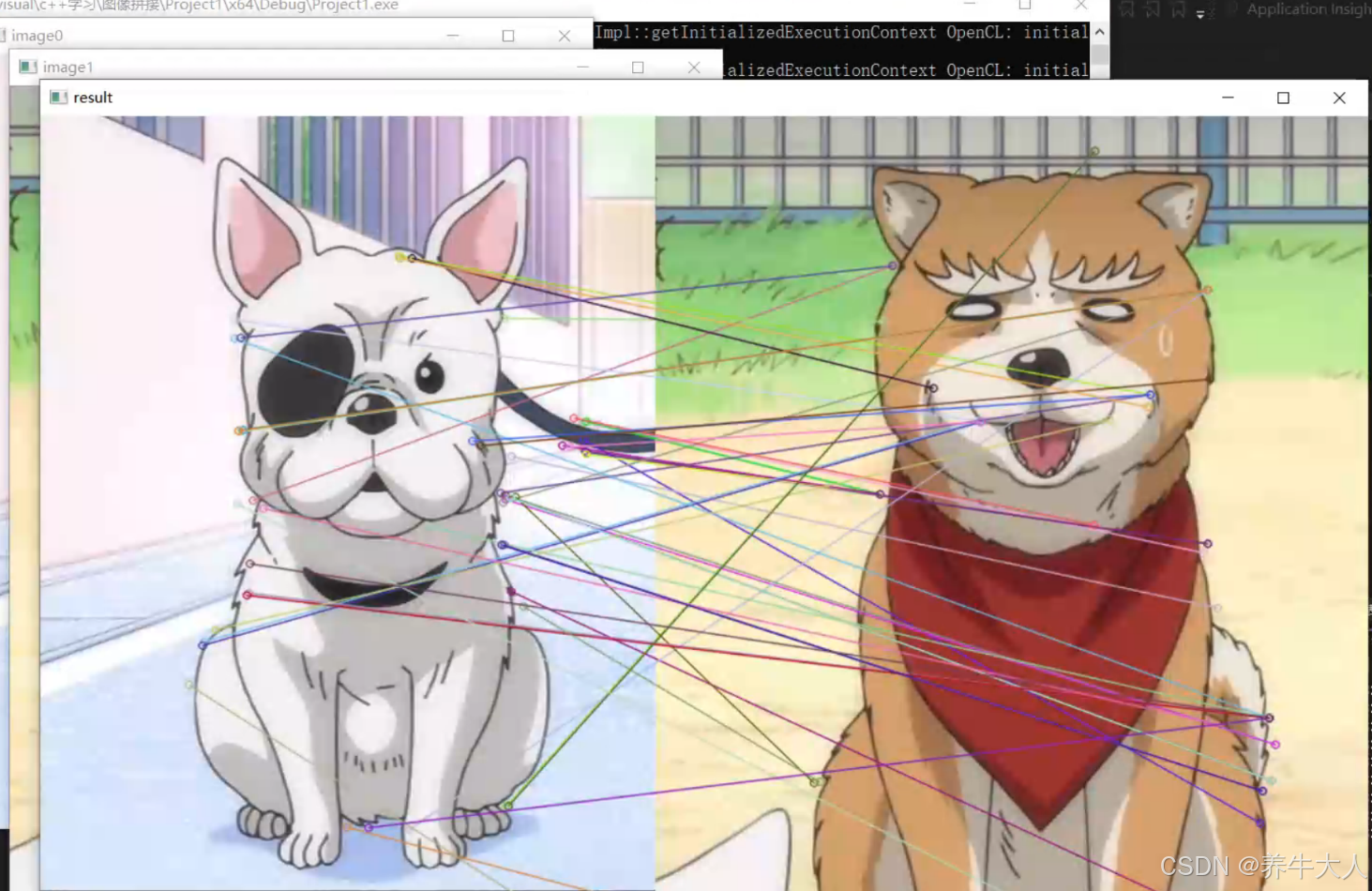
cv::Mat result;
cv::drawMatches(image0, key0,
image1, key1,
good_matches, result,
cv::Scalar::all(-1), cv::Scalar::all(-1),
std::vector<char>(),
cv::DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS); //绘制匹配点
cv::imshow("result", result);
cv::waitKey(0);
}


























 962
962

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











