




很多小伙伴咨询说博客文章里的技术图怎么画出来的,这里透个底,大部分都是通过processon画出来的,在线画图十分方便,几乎可以画出你想要的任何技术图,包括:流程图、思维导图、原型图、UML图、网络拓扑图、组织结构图等等。
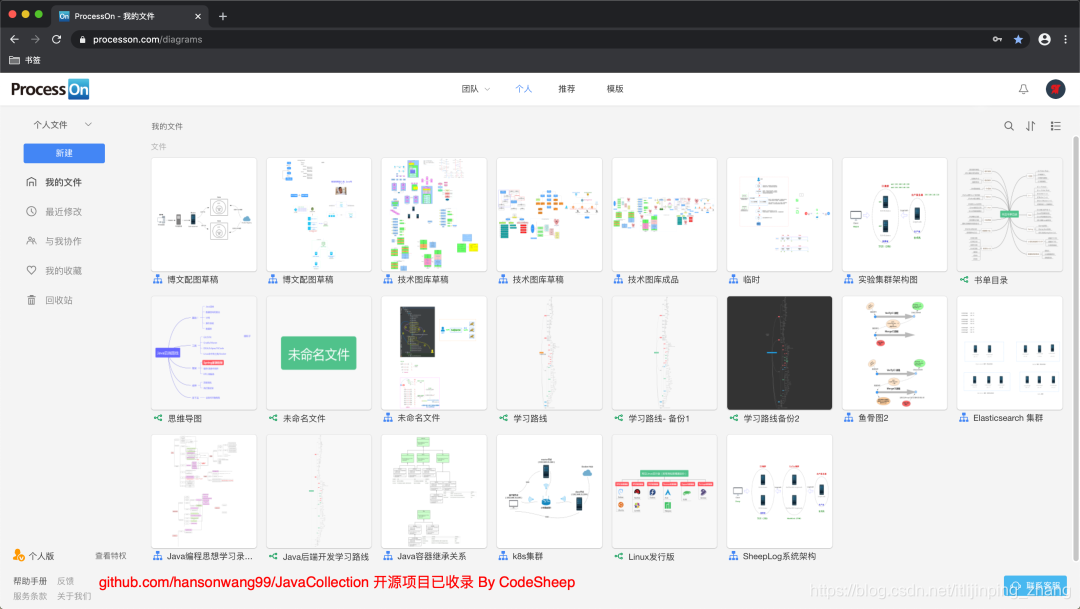
https://processon.com/
代码图片神器
很多小伙伴常问,公众号文章里的类似这样的代码图片是如何做出来的:
这就得用到这个专门做代码图片的神器工具网站了,比如这里的dute:
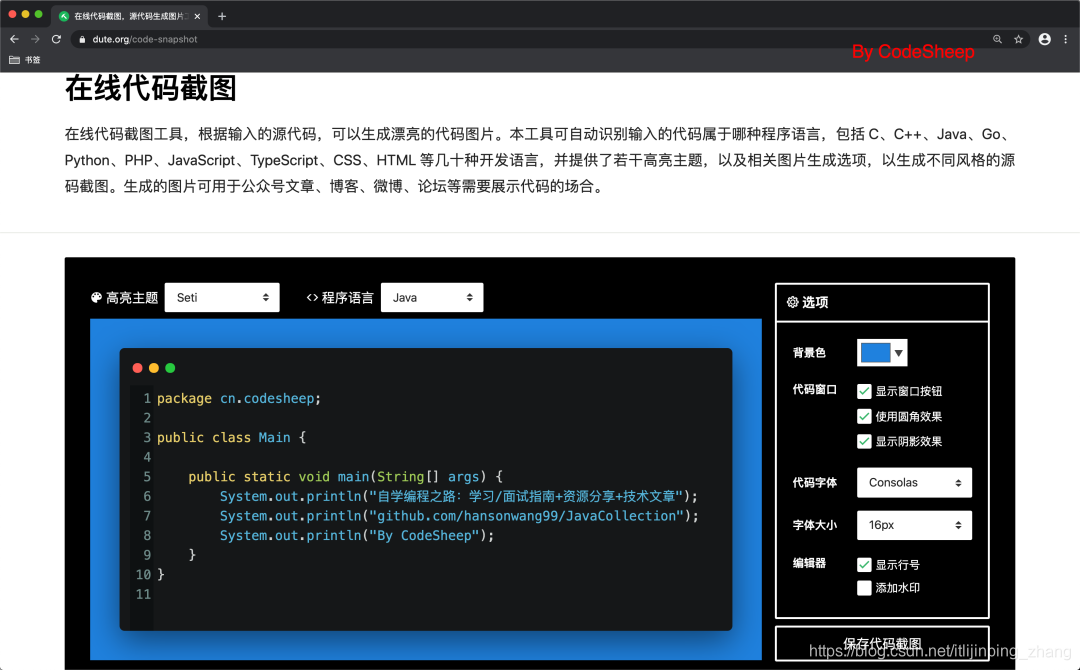
https://www.dute.org/code-snapshot
在线任务管理工具
日常记录需求、灵感和待办事项没有称手的小工具?想做详细的学习任务规划和管理没有好地方?我想Trello应该能够帮到你。
从图中可以看出,这种泳道配合任务卡片的拖动方式使用起来还是非常可以的。
事实上Trello的功能远不止此,它甚至是一个非常好用的团队协作工具,而且Trello均配有客户端的App,跨平台同步使用非常方便。

https://trello.com/
图片超分辨率神器
如果现在手里有一张低分辨率的小图,如果让它变成高清大图呢,就像这样:
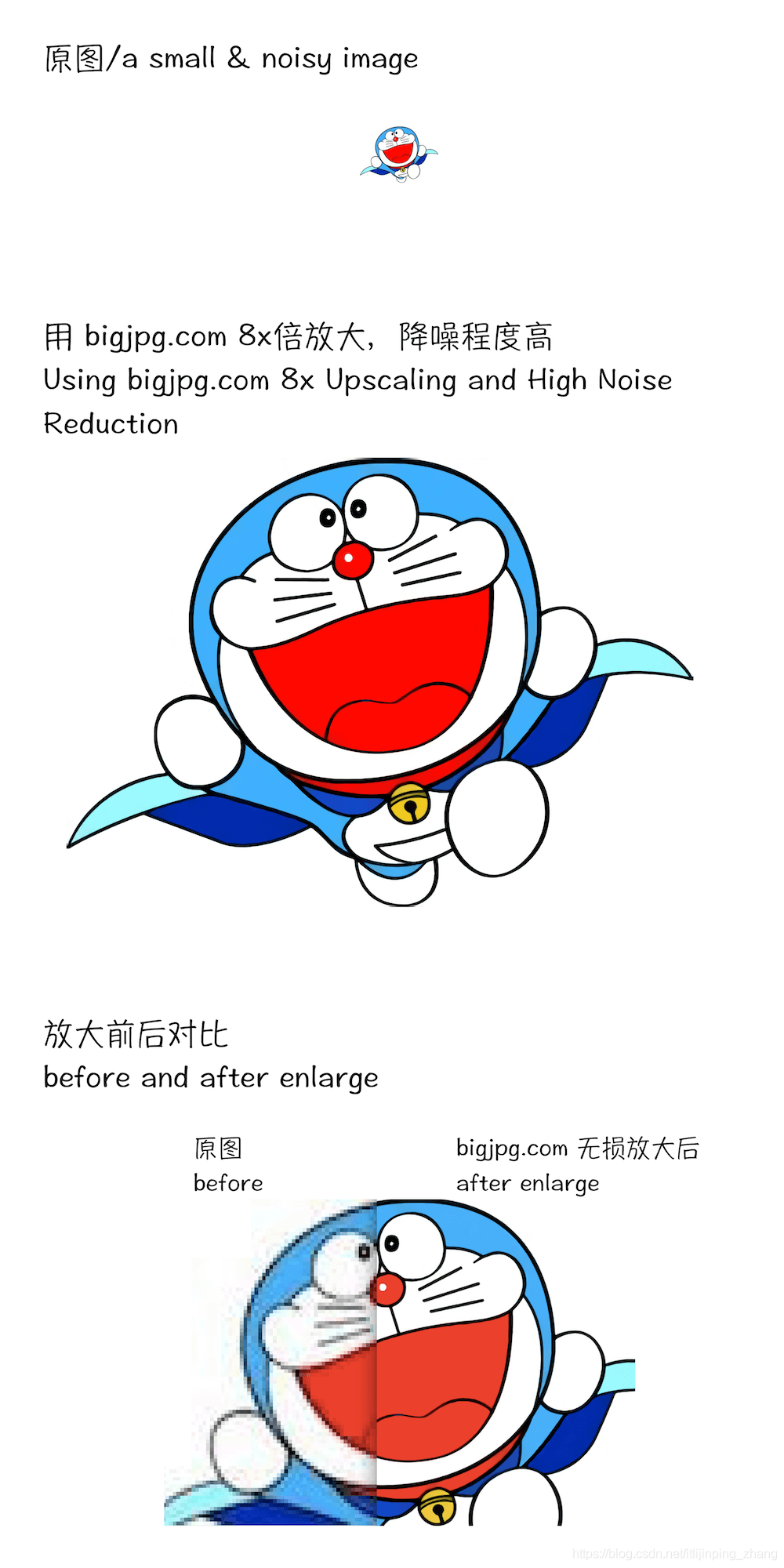
那么就可以借助于bigpig这款在线图片超分辨率神器,它使用的是人工智能方面的深度学习技术进行图片超分辨率,挺有特色的。
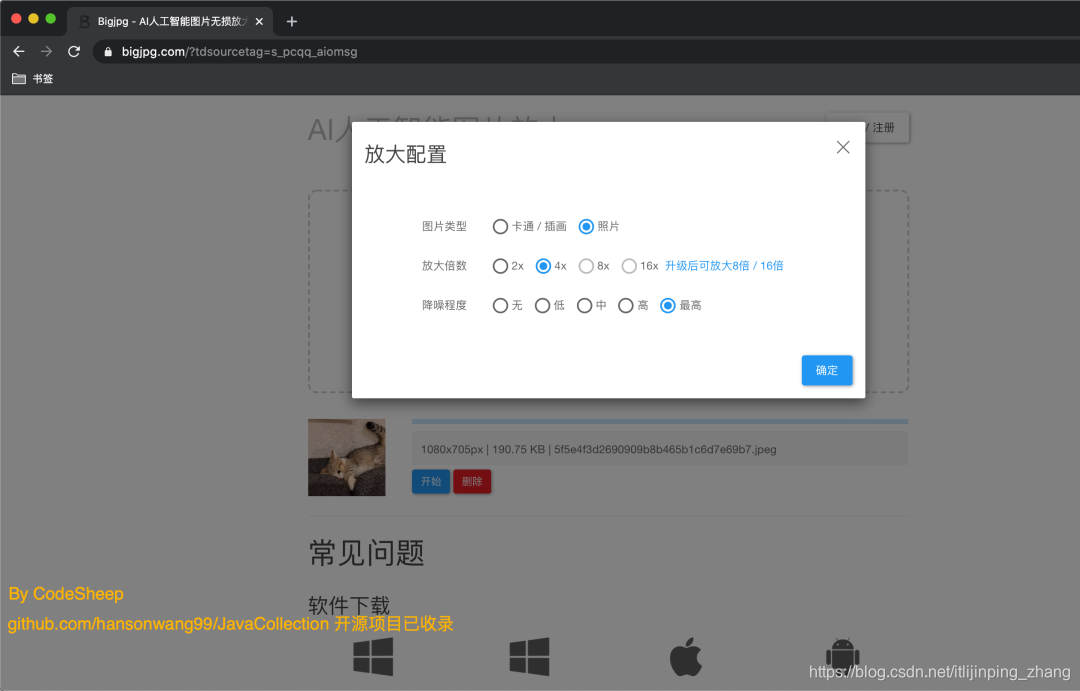
https://bigjpg.com/
在线PS神器
uupoop是一款好用的在线图片处理工具站,堪称在线PS神器,支持编辑psd、xd、sketch等多种格式的文件处理,非常强大。除此之外,上面还集成了各种封面制作、海报制作和GIF动图制作等在线工具,爱了。

https://www.uupoop.com/
在线音频剪辑神器
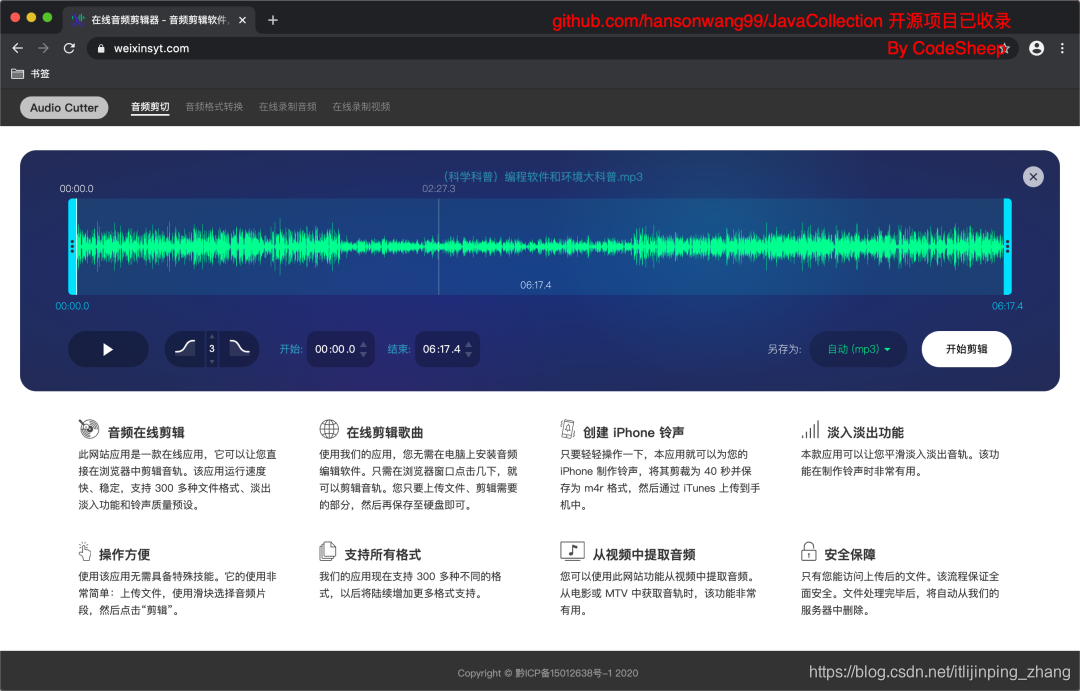
这款在线工具网站可以让您直接在浏览器中剪辑音轨,并且支持多种文件格式,有点香。
https://www.weixinsyt.com/
在线视频剪辑神器
kapwing是一款在线轻量级的视频编辑studio,除了支持日常的视频编辑之外,还有很多工具集供使用,上手很容易
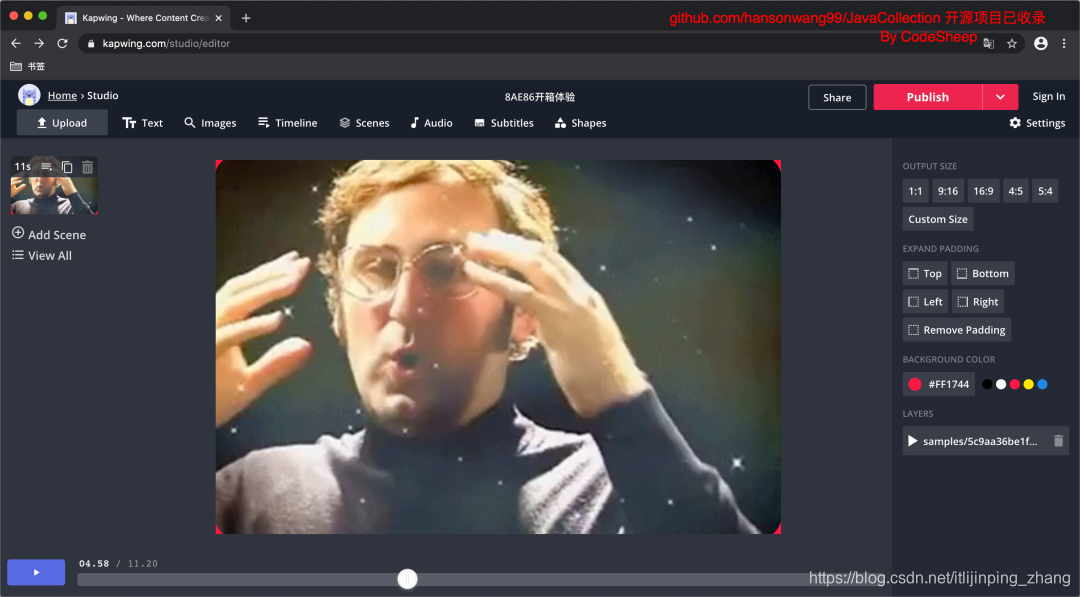
https://www.kapwing.com/
在线PDF神器
PDF派,一个包含了20个好用PDF在线工具的网站,各种转换都不在话下。

https://www.pdfpai.com/
在线压缩神器
图片压缩、GIT压缩、PDF压缩等,都可以借助在线网站docsmall完成。上传、处理、下载,三步搞定,很便利。
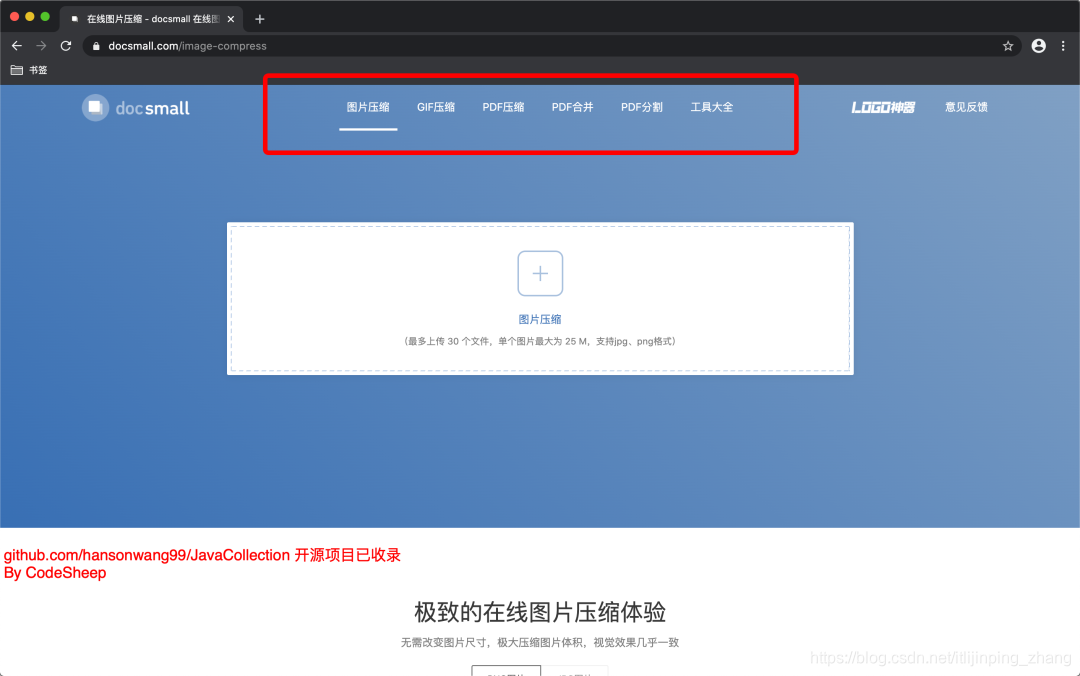
https://docsmall.com/
在线短链接神器

长链接转短链接工具,而且还提供API接口供编程操作,生成的短链接还能在后台检测访问数据。
http://mrw.so/
在线emoji神器
有时候我们做封面或者配图,需要点emoji表情来点缀,那素材哪里找呢?
emojiisland是一个不错的去处,emoji表情成套,PNG格式的可以免费下载。
- https://emojiisland.com/
好啦,这次先整理出个人在平时工作和学习工程中常用的工具网站,后面遇到好玩的、有用的也会持续分享,也欢迎小伙伴们分享和安利出你们觉得有用的工具。


















 1779
1779

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









