




 本文详细介绍了如何使用JBoss实现Java消息机制(JMS),包括安装、配置用户认证、启动服务器以及加载消息服务组件的过程,并提供了服务器端文件系统结构的对比和不同启动模式的说明。
本文详细介绍了如何使用JBoss实现Java消息机制(JMS),包括安装、配置用户认证、启动服务器以及加载消息服务组件的过程,并提供了服务器端文件系统结构的对比和不同启动模式的说明。
本文将讨论JBoss 下JMS 的实现,不熟悉Java 消息机制的同学请参考 http://www.ibm.com/developerworks/java/tutorials/j-jms/ 。
还没有安装 JBoos 吗?这里下载吧 http://www.jboss.org/jbossas/downloads/
Step 1 : 创建用户
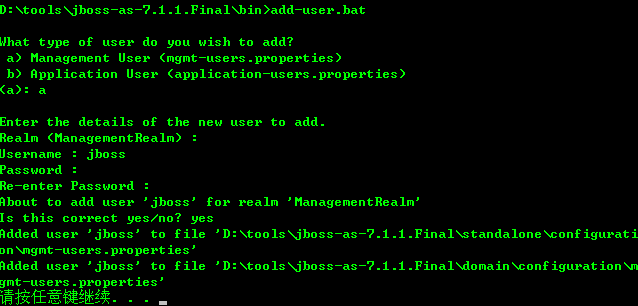
不同的身份认证"Realm "策略请参考:https://docs.jboss.org/author/display/AS71/Security+Realms
Step 2 : 启动服务器
JBoss 7 和之前发布的版本相比较应该说有不小的改变,而基本上所有的新特性都是围绕"Modular Service Container "的实现。下图为JBoss 服务器端文件系统的结构,是不是有点眼熟啊?是克隆weblogic 吗?
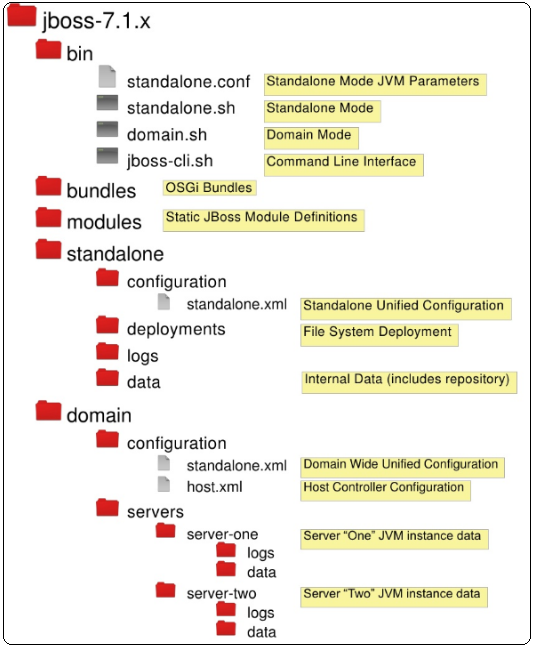
JBoss 7 可以运行在Domain 模式即每个server instance 有独立的JVM, 或者运行在Standalone 模式即所有的server instance 共用一个JVM.
在DOS 窗口运行%JBOSS_HOME%/bin/standalone.bat , JBoss即在独立模式下启动了 。
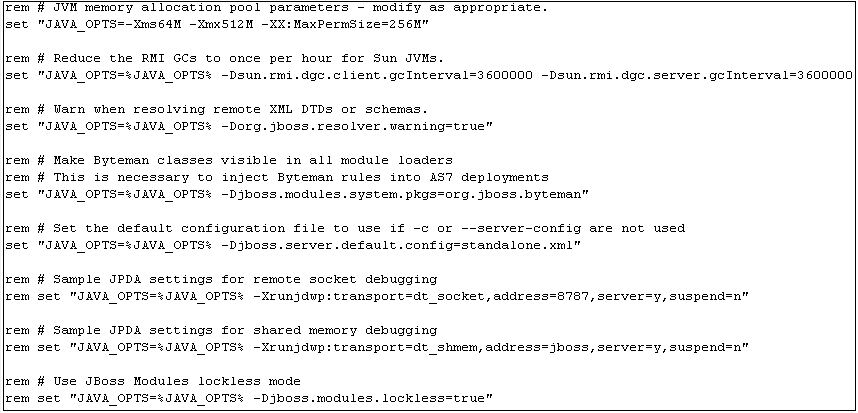
修改服务器的启动配置项%JBOSS_HOME%/bin/standalone.conf.bat
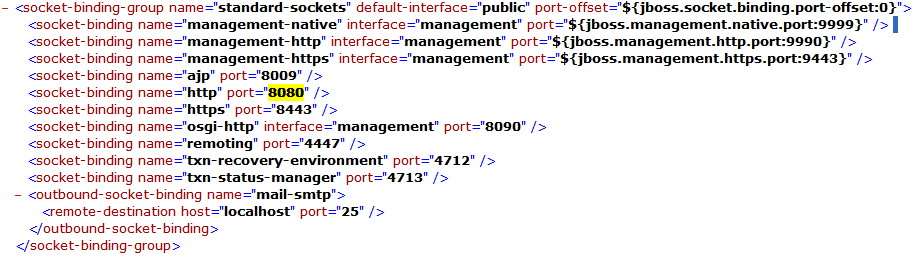
修改默认配置服务器端口%JBOSS_HOME%/standalone/configuraiton/standalone.xml
Step 3 : 加载消息服务组建
以standalone 模式启动,服务器默认加载%JBOSS_HOME%/standalone/configuraiton/standalone.xml , 此配置文件并不包含消息服务组件。
用下面命令启动服务器,系统输出日志里会显示"live server is starting with configuration HornetQ Configuration"就表示消息服务组件已经加载了。
%JBOSS_HOME%/bin/standalone.bat -c standalone-full.xml
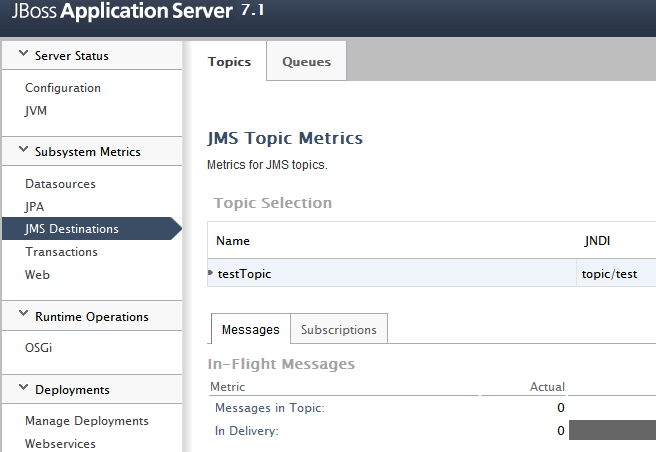
系统自动创建了testTopic和testQueue : http://localhost:9990/console
第一天 完结

















 3082
3082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









