




 本文介绍了使用递归和非递归方法实现连分数计算黄金分割点的算法。通过定义cont-frac函数并设置适当的n-gen和d-gen参数,可以精确地求得黄金分割点的近似值。
本文介绍了使用递归和非递归方法实现连分数计算黄金分割点的算法。通过定义cont-frac函数并设置适当的n-gen和d-gen参数,可以精确地求得黄金分割点的近似值。
sicp的练习题1.37需要实现递归和非递归两个版本“连分数”计算黄金分割点的算法
连分数的介绍在这里, 它是一个类似于这样的分数:
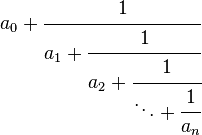
如果连分数中的[a0, a1, a2...]均取1的话,这个分式的结果就是黄金分割点的值。
更一般的,我们把第k层的分子叫做N_k, 分母中左侧部分叫做D_k, 那应该有一个方法:
cont-frac
这个方法有三个参数,n-gen, d-gen,它们是两个方法,参数是k,返回就是对应的k时N和D的值(对应到计算黄金分割点的公式中,这两个方法一直返回1)。第三个参数就是计算的层级,也就是k了。
下面是一个递归版本:
(defun cont-frac (n-gen d-gen k)
(if (< k 2)
(/ (funcall n-gen k)
(funcall d-gen k))
(/ (funcall n-gen k)
(+ (funcall d-gen k)
(cont-frac n-gen d-gen (- k 1))))
)
)
如果没有到最后一次迭代,就返回 N_k / (D_k + 下一次迭代的结果)
还有一个非递归的版本:
(defun iter-cont-frac (n-gen d-gen k)
(defun iter-cont-frac-iter
(n-gen d-gen k rst)
(if (< k 1)
rst
(progn (format t "~a~T~a~%" rst k)
(iter-cont-frac-iter
n-gen
d-gen
(- k 1)
(/ (funcall n-gen k)
(+ (funcall d-gen k)
rst)))))
)
(iter-cont-frac-iter n-gen d-gen k 1)
)
每次都使用一个额外的参数 ‘rst’来记录前面迭代的结果,这也是在递归和线性之间变换的通用方法了。
下面我们调用一下看看(还打印出了中间值):
(format t "~a~%" (iter-cont-frac #'(lambda (i) 1.0)
#'(lambda (i) 1.0)
20))
返回的结果是这样的:
写道
1 20
0.5 19
0.6666667 18
0.59999997 17
0.62500006 16
0.61538464 15
0.61904765 14
0.61764706 13
0.6181818 12
0.6179775 11
0.6180556 10
0.6180257 9
0.6180371 8
0.6180328 7
0.6180344 6
0.6180338 5
0.618034 4
0.618034 3
0.618034 2
0.618034 1
0.618034
0.5 19
0.6666667 18
0.59999997 17
0.62500006 16
0.61538464 15
0.61904765 14
0.61764706 13
0.6181818 12
0.6179775 11
0.6180556 10
0.6180257 9
0.6180371 8
0.6180328 7
0.6180344 6
0.6180338 5
0.618034 4
0.618034 3
0.618034 2
0.618034 1
0.618034


















 266
266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









