



 文章讲述了作者在局域网环境下,通过编写批处理脚本使用ping命令检查网络状态,以判断IP段内计算机的通讯情况,并分享了一个示例和用法。作者寻求进一步学习和改进的建议。
文章讲述了作者在局域网环境下,通过编写批处理脚本使用ping命令检查网络状态,以判断IP段内计算机的通讯情况,并分享了一个示例和用法。作者寻求进一步学习和改进的建议。
局域网内限制很多,好多简单实用的外部软件无法使用,就连绿色软件也尽量避免。批处理bat真是很强大,DOS命令做成批处理文件能够解决很多重复繁杂的工作,学了点批处理bat的皮毛,也想通过csdn网站再进一步学习,同时挣点外快。放一个大家给评评,多提宝贵意见,再进一步升级改造。
《按网段检查局域网计算机通讯》
工作中时常需要了解局域网内计算机开机情况,于是写了个通过ping命令查看网络状态的批处理文件,能够简单的判断该IP段内地址的通讯情况。
代码:
@echo off
set /p ip=请输入IP地址段:
set /p ks=请输入起始段:
set /p js=请输入结束段:
for /l %%i in (%ks%,1,%js%) do (
ping.exe -w 1 -n 1 %ip%%%i && echo %ip%%%i 通 >>ipscan.txt ||echo %ip%%%i 不通 >>ipscan.txt )
notepad ipscan.txt
del ipscan.txt
用法:
1、解释
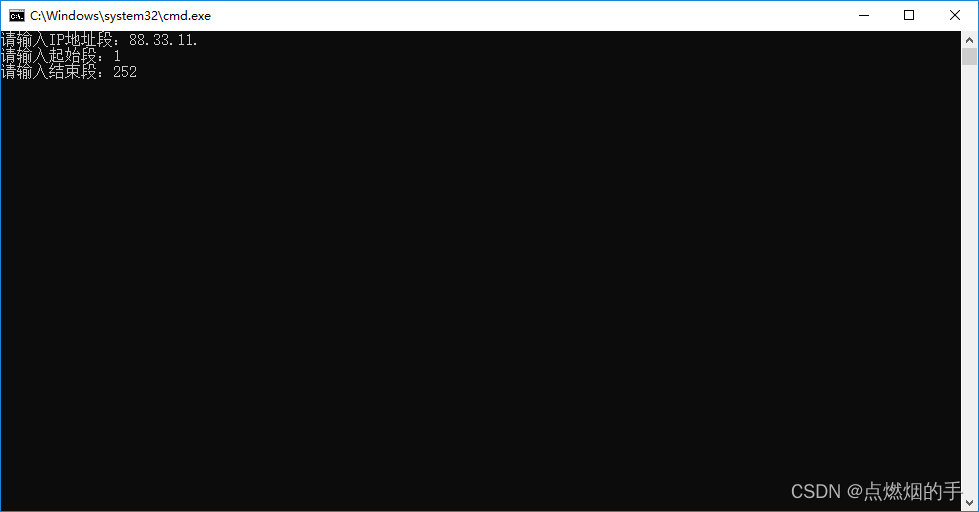
请输入IP地址段------输入网络IP地址段。例:88.33.11.(要注意最后的点也得输入)
请输入起始段------起始地址。例:1
请输入结束段------结束地址。例:252
举例:
2、程序执行完毕后生成《ipscan.txt》文件,ping的结果全部再文档里。注意:关闭文档会自动删除生成的文本文件。


















 2544
2544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











