






一.编码器接口
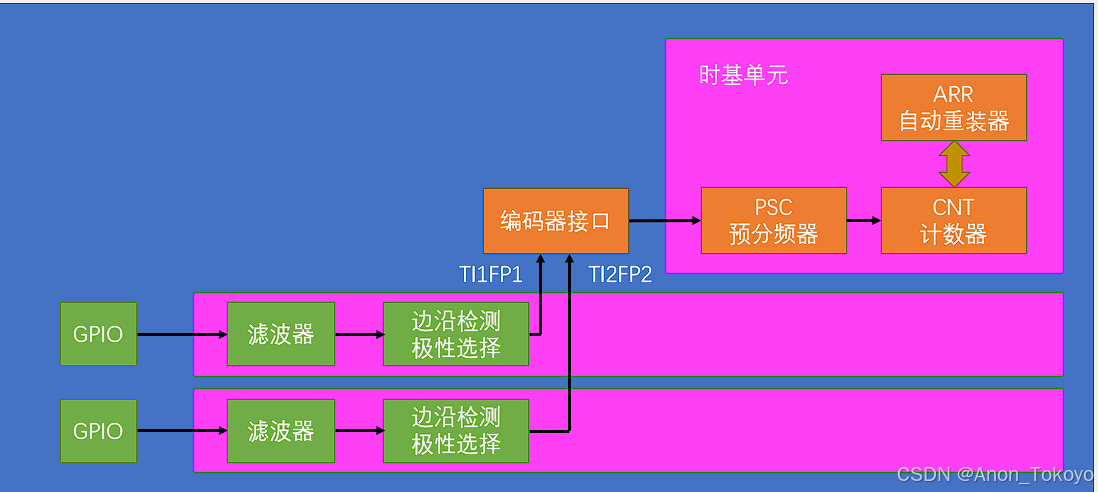
1.每个高级或通用的定时器都有一个编码器接口,而两个输入引脚共用定时器的输入捕获通道1和2
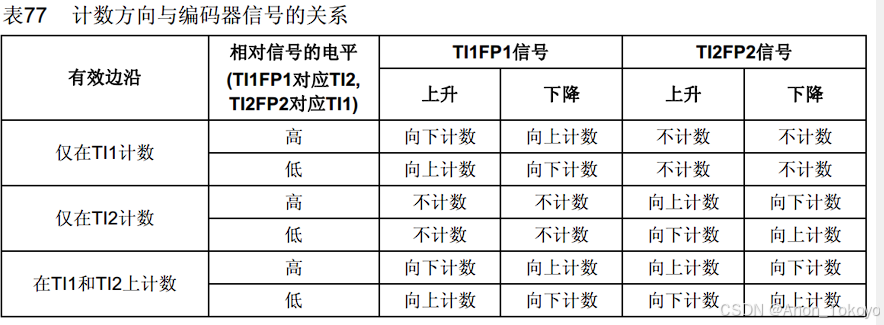
2.编码器接口模式下,可以通过检测编码器AB两相的边沿来控制CNT自增或自减。可以用来测量编码器的方向以及速度等。
3.对比编码器信号与技术方向表,可以看出正转为向上计数,反转为向下计数。
二.代码实现:
1.使能RCC时钟
2.配置GPIO
3.配置时基单元
4.配置输入捕获模式(仅边沿、滤波、通道)
5.配置输出比较通道(输出PWM驱动电机)
void PWM_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA2引脚初始化为复
用推挽输出
//受外设控制的引脚,均
需要配置为复用模式
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 1000 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //配置TIM2的时基单元
TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量
TIM_OCStructInit(&TIM_OCInitStructure); //默认结构体初始化
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择PWM模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能
TIM_OCInitStructure.TIM_Pulse = 50; //初始的CCR值
TIM_OC3Init(TIM2, &TIM_OCInitStructure); //配置TIM2的输出比较通道3,此时可以输出PWM波形
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
void PWM_Judge(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设定上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //不分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 65535 - 1; //防止溢出,设定最大数
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
TIM_ICInitTypeDef TIM_ICInitStruct;
TIM_ICInitStruct.TIM_Channel=TIM_Channel_1; //选择通道1,因为编码器接口
//共用CHN1/CH2通道
TIM_ICInitStruct.TIM_ICFilter=0xF;
TIM_ICInit(TIM3,&TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel=TIM_Channel_2; //选择通道2,因为编码器接口
//共用CHN1/CH2通道
TIM_ICInitStruct.TIM_ICFilter=0xF;
TIM_ICInit(TIM3,&TIM_ICInitStruct);
TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Falling,TIM_ICPolarity_Falling); //设定编码器模式,计数方式为
//双相计数。值得注意的是,此
//时的极性选择仅设定是否取反
TIM_Cmd(TIM3, ENABLE);
}

















 3389
3389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









