







 本文介绍了基于计算机辅助的糖尿病视网膜病变(DR)和糖尿病黄斑水肿(DME)检测方法。通过病灶分割技术,算法在HEI-MED、MESSIDOR和DIARETDB1数据集上进行评估。DME检测利用颜色、小波分析和自动病灶分割特征,而DR诊断主要基于微动脉瘤(MAs)检测。实验结果显示,算法在不同数据集上表现出良好的泛化能力,与专家诊断相比具有高灵敏度。整个筛查过程在22.3秒内完成,展示了算法的高效性。
本文介绍了基于计算机辅助的糖尿病视网膜病变(DR)和糖尿病黄斑水肿(DME)检测方法。通过病灶分割技术,算法在HEI-MED、MESSIDOR和DIARETDB1数据集上进行评估。DME检测利用颜色、小波分析和自动病灶分割特征,而DR诊断主要基于微动脉瘤(MAs)检测。实验结果显示,算法在不同数据集上表现出良好的泛化能力,与专家诊断相比具有高灵敏度。整个筛查过程在22.3秒内完成,展示了算法的高效性。
6.计算机辅助检测
在本章中,我们介绍了通过先前介绍的病灶分割技术来自动检测DME和DR的方法。为了评估算法,使用了三个公共数据集:HEI-MED、MESSIDOR和DIARETDB1数据集。介绍了交叉数据集测试(分类器在一个数据集上测试,在另一个数据集上训练)。对于DR检测,我们统计组合了MAs分割的输出,而对于DME诊断,则采用了一组基于颜色、小波分解和自动病灶分割的新特征。所介绍的技术在计算上非常高效,在2.6 GHz平台上运行算法的未优化Matlab实现,从未经过训练的图像(包括病变、血管和ON分割)开始获得DR和DME完整诊断所需的总时间为22.3秒。部分工作已在Giancardo等人的著作中发表。
Giancardo,(2011):Exudate-based diabetic macular edema detection in fundus images using publicly available datasets
6.1简介
第2.4节介绍了糖尿病视网膜病变筛查自动化系统的现状及其对糖尿病患者健康的潜在影响。在本章中,我们介绍了诊断DR和DME的方法。使用两种不同的技术分别诊断这些疾病,这两种技术都使用在45°拍摄,以单个黄斑为中心的彩色眼底图像。根据Williams等人 (2004),这样的图像不适合深度治疗计划,,但达到了筛选目的,它极大地简化了成像过程。事实上,尤其是通过未扩张的瞳孔,采集不同的视网膜图像并不是一件简单的任务。
第2.4.1节中介绍了DR/DME的不同分级标准。其中一些检查非常详细,可以准确监测疾病的进展。在筛查的情况下,只要检测到某种形式的DR,即使是很小的病变,就会触发阳性的输出结果,得到是/否转诊的决定就足够了。显然,某些病例可能比其他病例更紧急,因此我们还开发了一种仅用于DME的独立筛查算法。DME是DR的一种并发症,如果发现,需要及时治疗,但轻度DR的情况并不总是引起DME。
DR诊断方法主要基于第5章中介绍的MAs检测器的输出。检测到的MAs数量及其概率用于生成特征向量,然后对该向量进行分类以生成患DR的概率。即使不将DR的其他典型病变用于检测目的,我们的方法也可获得与其他最先进技术相当或更好的结果。
DME诊断方法采用第4章中介绍的渗出物分割算法。然而,该算法并不仅仅用于诊断DME。我们提出了一个分类框架,该框架将其他域的分析(基于颜色和小波)与图像级别的渗出液分割图相结合。这不同于典型方法,在典型方法中,根据某些度量将每个病变分别分类为真阳性或假阳性。我们创建了一个固定大小的特征向量,而不考虑病变的数量,优势在于能够在数据集不包含病变级别的基本事实(GT)的情况下训练算法,但每个图像只有一个诊断。这也归功于我们基于规则的渗出物分割算法。
两种算法的开发均在HEI-MED数据集上进行(部分在ROC数据集上进行)。其他两个可用的公共数据集(MESSIDOR和DIARETDB1)中的图像不用于调试算法,而用于测试。我们的算法很好地推广到其他数据集,这是在自动眼底图像处理和一般的机器学习中的一个常见的模型泛化能力问题。
第6.2节描述数据集。第6.3节总结Tobin等人(2007)介绍的ON定位方法。第6.4节描述用于DME自动诊断的技术。第6.5节介绍各种数据集上的DME诊断结果以及与两名视网膜专家的比较。第6.6节描述用于自动DR诊断的技术。第6.7节显示了使用MESSIDOR和HEI-MED数据集进行DR诊断的结果。第6.8节为结果和方法。
6.2数据集
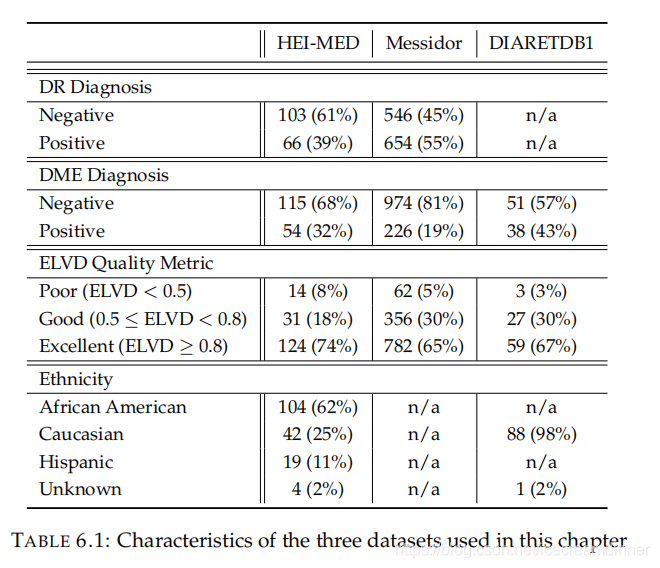
第4.2节介绍了HEI-MED数据集。除此之外,仅有两个可用于评估DR/DME诊断算法的公开数据集是MESSIDOR和DIARETDB1。前者仅提供每张图像的DR/DME诊断,而后者提供由四名不同眼科医生生成的病变图,但没有明确诊断。因此,对于DIARETDB1病例,DME诊断是通过分析渗出基本事实(GT)分布图得到的。如果四分之三的专家认为任一像素处存在渗出物,则使用DME对图像进行诊断。然而,由于黄斑上的某些暗伪影与MAs非常相似,它们可能是由于眼底照相机镜头上的一些小圆形污垢堆积所致,因此不将此数据集用于DR诊断测试。人们发现:这些与MAs非常相似的暗伪影总是出现在完全相同的位置。这是一个在实际临床环境中并不常见的问题,因此在第8章中介绍了一种通过多个眼底图像去除各种类型的晶状体伪影的技术(该技术集中在最常见的明亮的伪影上)。表6.1显示了数据集的一些细节。
在本工作中使用的数据集内,所有图像都是使用不同的眼底相机(甚至在整个同一数据集内)用45°FOV相机拍摄的。在MESSIDOR数据集中,图像是由位于法国的多个研究小组获得的。异质性、大量图像、公共可用性和独立性使这些数据集成为我们算法的理想无偏验证。
6.3ON定位
针对DR/DME诊断提出的方法源自前面章节中提出的渗出物和微动脉瘤定位算法。渗出物分割算法的一个重要步骤是定位ON中心。在之前的测试和实验中,它的位置是从手动生成的元数据中获取的,这样可以单纯评估算法的性能,而不受定位ON这个预处理步骤的影响。但是,对于全自动诊断,算法必须识别ON的位置。第2.2.4节概述了此类任务的当前技术。为了我们的目的,我们使用了Tobin等人(2007)提出的方法。
Tobin等人(2007):Detection of anatomic structures in human retinal imagery
作者将ON定位作为贝叶斯问题,其中先验概率![]() 分别是在给定像素处找到/找不到ON的二维似然图。由于使用的所有眼底图像都以黄斑为中心,并且具有相同的相机FOV(但VFOVs和分辨率不同,因为它们是由多个相机采集的),因此这些图像是基本对齐的。在最终筛选系统中,所有图像都通过QA算法(如第3章所述)进行筛查,因此我们可以假设图像对齐合理。要与先验(血管分割图)组合以生成后验概率(血管与ON信息)的条件概率是
分别是在给定像素处找到/找不到ON的二维似然图。由于使用的所有眼底图像都以黄斑为中心,并且具有相同的相机FOV(但VFOVs和分辨率不同,因为它们是由多个相机采集的),因此这些图像是基本对齐的。在最终筛选系统中,所有图像都通过QA算法(如第3章所述)进行筛查,因此我们可以假设图像对齐合理。要与先验(血管分割图)组合以生成后验概率(血管与ON信息)的条件概率是![]() 和
和![]() ,其中ν是包含血管系统衍生特征的4维向量。血管系统表示为二进制图,并由Zana和Klein (2001)用基于规则的方法自动生成。二元血管图称为Ib,其形态学骨架化版本称为Ibs。使用的功能描述如下:
,其中ν是包含血管系统衍生特征的4维向量。血管系统表示为二进制图,并由Zana和Klein (2001)用基于规则的方法自动生成。二元血管图称为Ib,其形态学骨架化版本称为Ibs。使用的功能描述如下:
Zana和Klein (2001):Segmentation of vessel-like patterns using mathematical morphology and curvature evaluation
视网膜亮度:该特征是唯一不以血管结构为基础的特征。它是用M×N局部窗口作为原始图像绿色通道上的平均亮度值来得到的,其中M = N = ON直径。经验估计,对于1024×1152的图像,ON直径(ONd)为130像素。对于具有不同分辨率的图像,此度量是线性缩放的。
血管密度:血管越靠近ON,密度越大。该特性是通过计算局部窗口为3 ONd × 0.6 ONd的Ibs中的正像素平均数来实现的。考虑到局部窗口的高度比宽度大得多,可以获得在ON附近突出的垂直血管。
血管厚度:通过比较局部Ib和Ibs计算平均血管厚度。计算两幅图像在ONd × ONd窗口大小下的局部平均值,然后用局部Ib平均值除以的局部Ibs平均值。
血管方向:该特征利用了这样一个事实,即靠近ON的血管是垂直的,并且随着远离ON,它们会趋向于更水平的方向。使用Freeman和Adelson (1991)描述的可控滤波器算法计算方向性。可控滤波器采用二阶高斯导数与该导数的希尔伯特变换相结合。
Freeman和Adelson (1991):The design and use of steerable fifilters
通过找到置信函数R中的最大值来计算ON的最终位置,置信
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











