车道线检测公开数据集添加类别信息




于 2021-11-04 15:20:46 首次发布

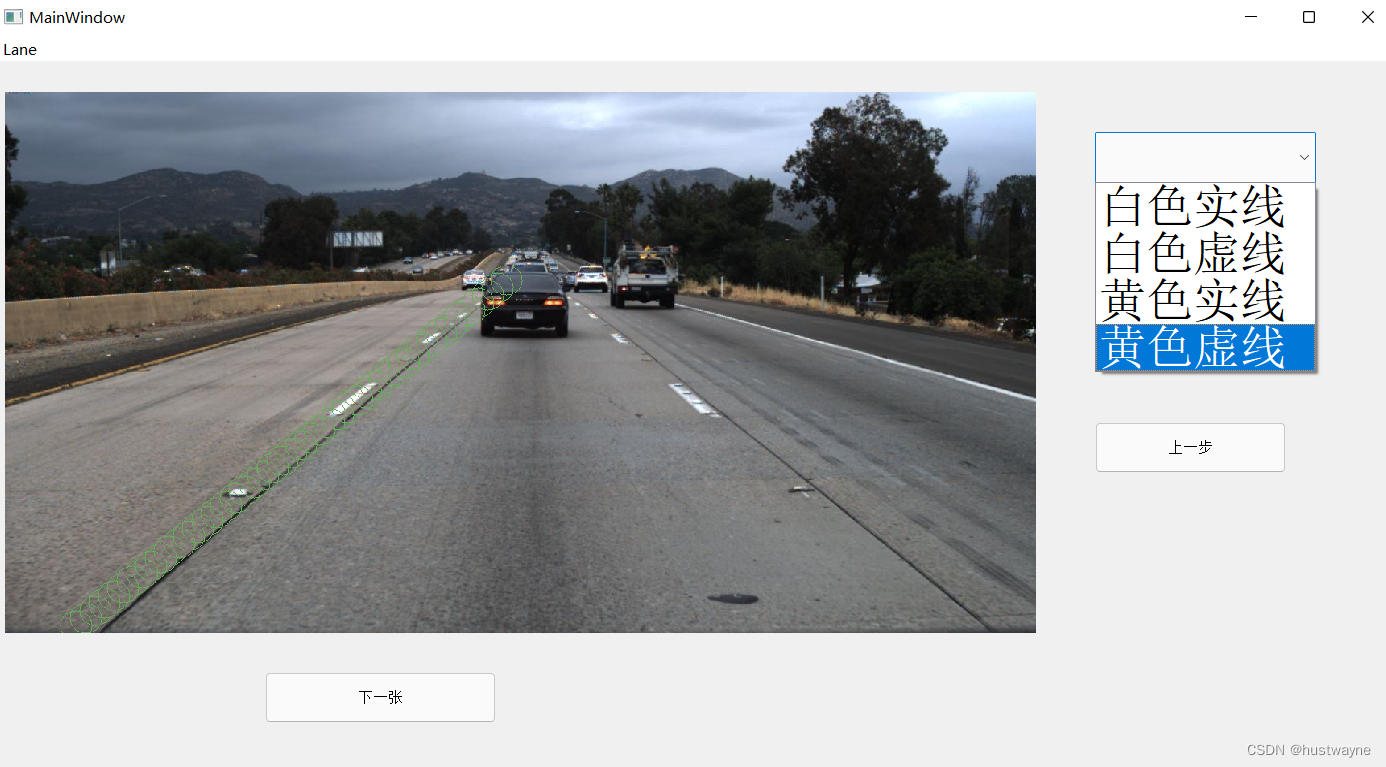
 本文介绍了一种在开源数据集culane和tusimple的基础上进行车道线类别信息增强的方法,新增了白实线、白虚线、黄实线和黄虚线四种车道线类型。
本文介绍了一种在开源数据集culane和tusimple的基础上进行车道线类别信息增强的方法,新增了白实线、白虚线、黄实线和黄虚线四种车道线类型。
本文介绍了一种在开源数据集culane和tusimple的基础上进行车道线类别信息增强的方法,新增了白实线、白虚线、黄实线和黄虚线四种车道线类型。
本文介绍了一种在开源数据集culane和tusimple的基础上进行车道线类别信息增强的方法,新增了白实线、白虚线、黄实线和黄虚线四种车道线类型。
 6014
1万+
1万+
6014
1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言