




 本文详细介绍了Linux中find和get命令的使用方法,包括find命令的where参数过滤,get命令通过项目编号获取信息,以及二者如何组合使用来处理动态项目编号的情况。强调了在涉及项目编号查找时,务必使用find配合get以确保正确性。此外,还提示读者充分利用命令的帮助系统学习更多相关命令。
本文详细介绍了Linux中find和get命令的使用方法,包括find命令的where参数过滤,get命令通过项目编号获取信息,以及二者如何组合使用来处理动态项目编号的情况。强调了在涉及项目编号查找时,务必使用find配合get以确保正确性。此外,还提示读者充分利用命令的帮助系统学习更多相关命令。
目录
上章讲了print命令,因为很重要,还重点讲了where参数的使用。本章接着继续讲常用的find和get还有其它命令
一、find和get命令的介绍
1.1 find命令介绍
find命令很简单,就是返回项目内部编号,可以通过where进行过滤,只有一个where参数,如下图所示:
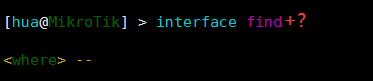
这个where参数怎么使用就不用讲了吧,如果忘记了可以看一下上章的where参数使用
把最难的print学了,是不是觉得其它都很简单了^_^
PS:与print的区别就是find只返回内部编号。
1.2 get命令介绍
1.2.1 get命令介绍
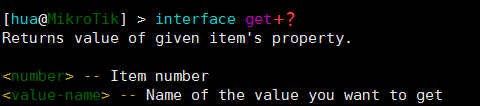
通过项目编号获取指定项目信息,也可以只获取其中一个属性,get只有2个参数,所下图所示:
第1个参数number是必须要写的,第2个value-name可以不填写
1.2.2 例子
比如不列出网卡的项目编号为3的信息,发现太多了,我只想要知道项目编号为3的网卡名,可以使用 value-name=字段名,这里是value-name=name,效果图如下:

1.3 get+find组合使用
从上面知道find只返回项目号,而get必须填写项目编号,而项目编号并不是固定不变的。
最典型的就是ppoe拨号,比如要获取某个账号的信息,而连接的账号对应的项目号是变化的,比如我这里有2个ppoe

我用的是账号p2,p2并不是固定就是项目编号编号编号2,我把p1账号断开,换成p3账号登录,再看一下变化

现在p2的项目号变成了0了吧,所以是变化的,如果我一非要要用户名为p2的用户的信息,比如在线时找,怎么办呢?
那就要用么get和find的组合了,命令可以写成:
:put [interface pppoe-server get number=[find user="p2"] value-name=uptime]
上面的 “:put”表示输入的意思,如果不使用 :put,是没有信息出来的。

PS:所以说如果用涉及项目号的查找,一定要记得使用find来查找,而不是直接填写项目编号,因为它是变化的。
二、其它命令
其它命令,比如set、remove、add、edit、move 等我就不再讲了。只需要记住一句话:
不断的使用帮助?符号,不断的tab看有哪些可以填写


















 2041
2041

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









