






3.8 线程同步
问题:卖第0张、第-1张门票,三个线程买同一张门票等等。
原因:三个线程并发执行去抢占线程资源,A进来休眠6000微秒的时候,B、C也可能进来。多个线程同时处理一个共享资源,出现线程同步问题,操作必须是原子性的。
/*
使用多线程实现买票的案例。
有3个窗口,一共是100张票。
*/
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 全局变量,所有的线程都共享这一份资源。
int tickets = 100;
//回调函数,函数指针
void * sellticket(void * arg) {
// 卖票
while(tickets > 0) {
usleep(6000);//睡眠6000微秒
printf("%ld 正在卖第 %d 张门票\n", pthread_self(), tickets);
tickets--;
}
return NULL;
}
int main() {
// 创建3个子线程,子线程做同样的事情,主线程不做买票操作,只做回收子线程资源等
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, sellticket, NULL);
pthread_create(&tid2, NULL, sellticket, NULL);
pthread_create(&tid3, NULL, sellticket, NULL);
// 回收子线程的资源,阻塞,连接
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
// 设置线程分离。
// pthread_detach(tid1);
// pthread_detach(tid2);
// pthread_detach(tid3);
pthread_exit(NULL); // 退出主线程
return 0;
}
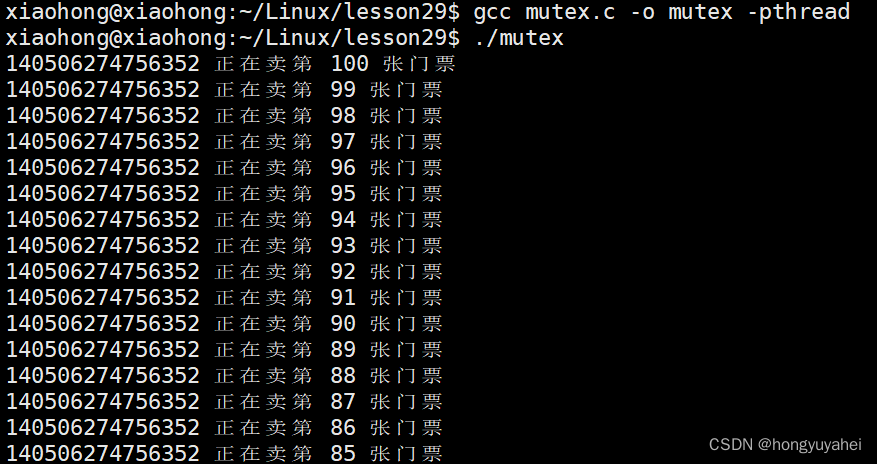
显示错误结果:
线程同步会带来一定的效率问题,但是是必要的。
3.9互斥锁
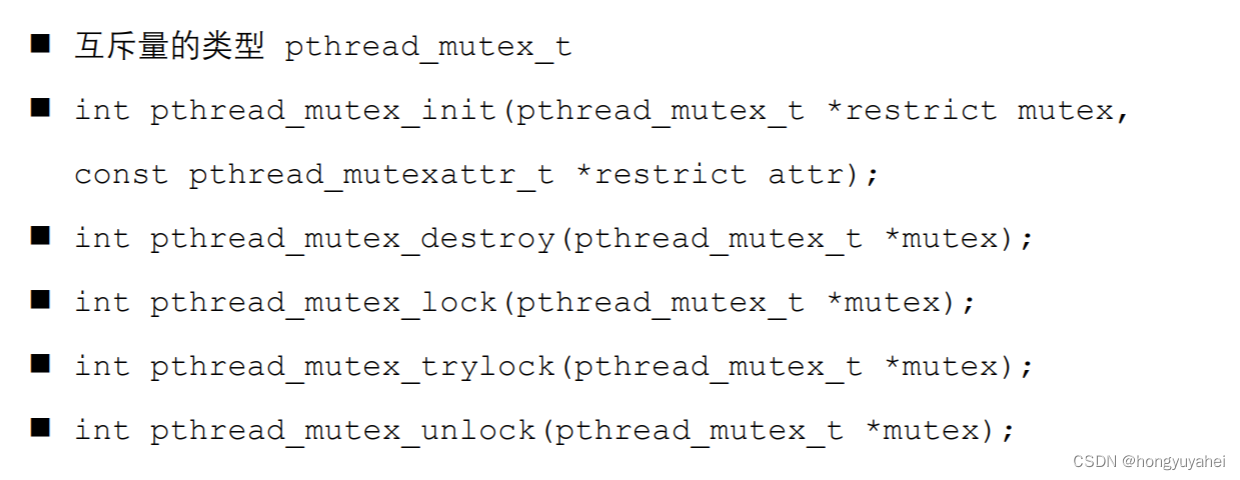
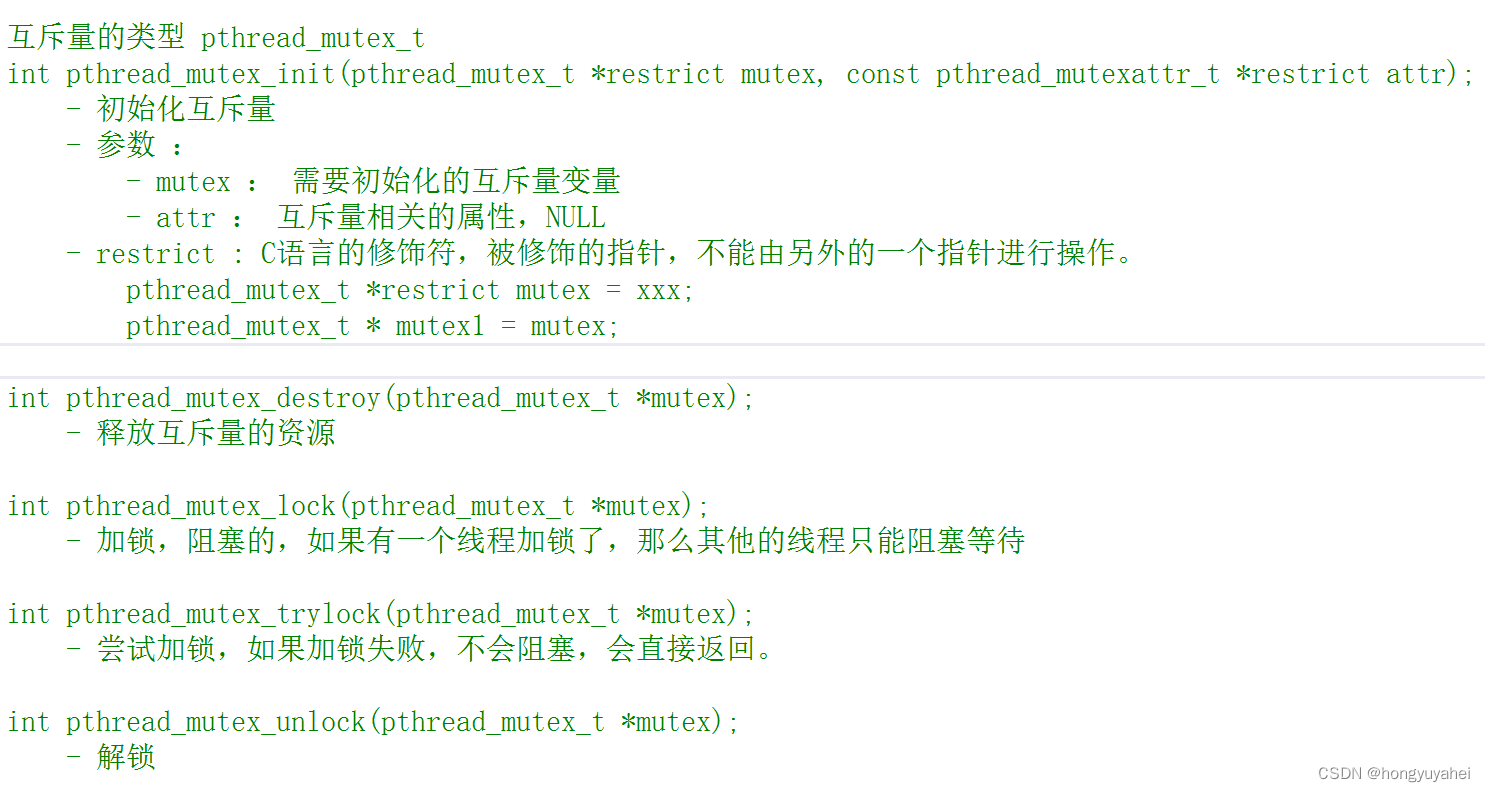
互斥量
互斥量相关操作函数
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 全局变量,所有的线程都共享这一份资源。
int tickets = 100;
// 创建一个互斥量
pthread_mutex_t mutex;
void * sellticket(void * arg) {
// 卖票
while(1) {
// 加锁
pthread_mutex_lock(&mutex);
if(tickets > 0) {
usleep(6000);
printf("%ld 正在卖第 %d 张门票\n", pthread_self(), tickets);
tickets--;
}else {
// 解锁
pthread_mutex_unlock(&mutex);
break;
}
// 解锁
pthread_mutex_unlock(&mutex);
}
return NULL;
}
int main() {
// 初始化互斥量
pthread_mutex_init(&mutex, NULL);
// 创建3个子线程
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, sellticket, NULL);
pthread_create(&tid2, NULL, sellticket, NULL);
pthread_create(&tid3, NULL, sellticket, NULL);
// 回收子线程的资源,阻塞
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
pthread_exit(NULL); // 退出主线程
// 释放互斥量资源
pthread_mutex_destroy(&mutex);
return 0;
}
3.10死锁
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 创建2个互斥量
pthread_mutex_t mutex1, mutex2;
void * workA(void * arg) {
pthread_mutex_lock(&mutex1);
sleep(1);
pthread_mutex_lock(&mutex2);
printf("workA....\n");
//先解2锁再解1锁
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
return NULL;
}
void * workB(void * arg) {
pthread_mutex_lock(&mutex2);
sleep(1);
pthread_mutex_lock(&mutex1);
printf("workB....\n");
pthread_mutex_unlock(&mutex1);
pthread_mutex_unlock(&mutex2);
return NULL;
}
int main() {
// 初始化互斥量
pthread_mutex_init(&mutex1, NULL);
pthread_mutex_init(&mutex2, NULL);
// 创建2个子线程
pthread_t tid1, tid2;
pthread_create(&tid1, NULL, workA, NULL);
pthread_create(&tid2, NULL, workB, NULL);
// 回收子线程资源
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
// 释放互斥量资源
pthread_mutex_destroy(&mutex1);
pthread_mutex_destroy(&mutex2);
return 0;
}
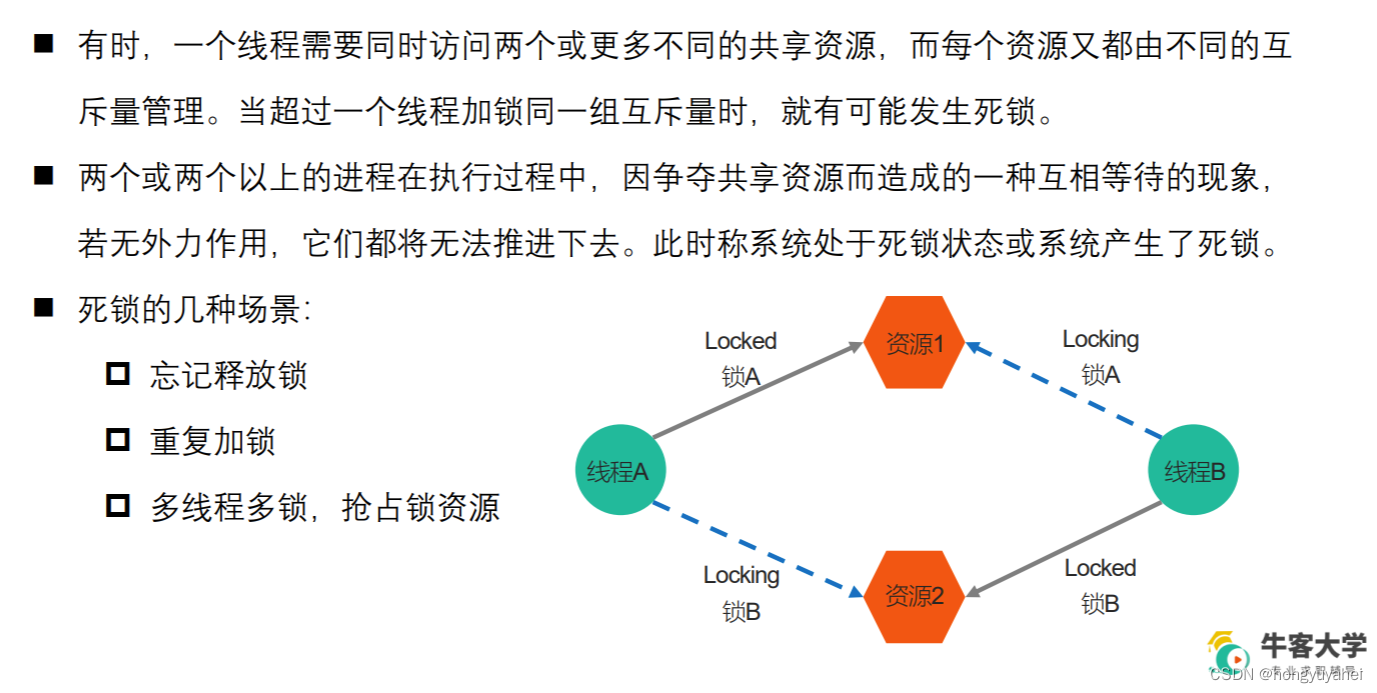
上述代码产生死锁:线程1获得锁1且申请锁2,线程2获得锁2且申请锁一。
产生死锁的四个必要条件:
互斥条件、占有且等待条件、不可抢占条件、循环等待条件。
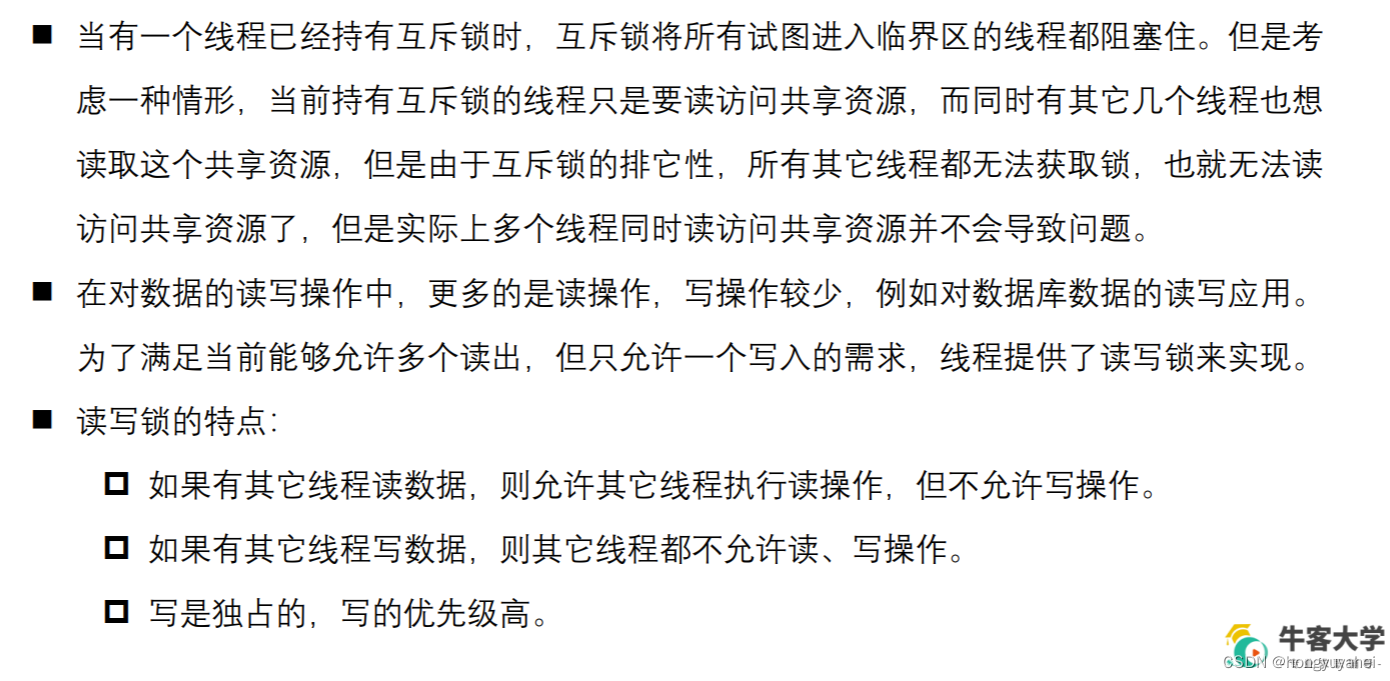
3.11读写锁
读写锁
读写锁比互斥锁效率要高一点,读的时候是并发执行,而互斥锁是串行。
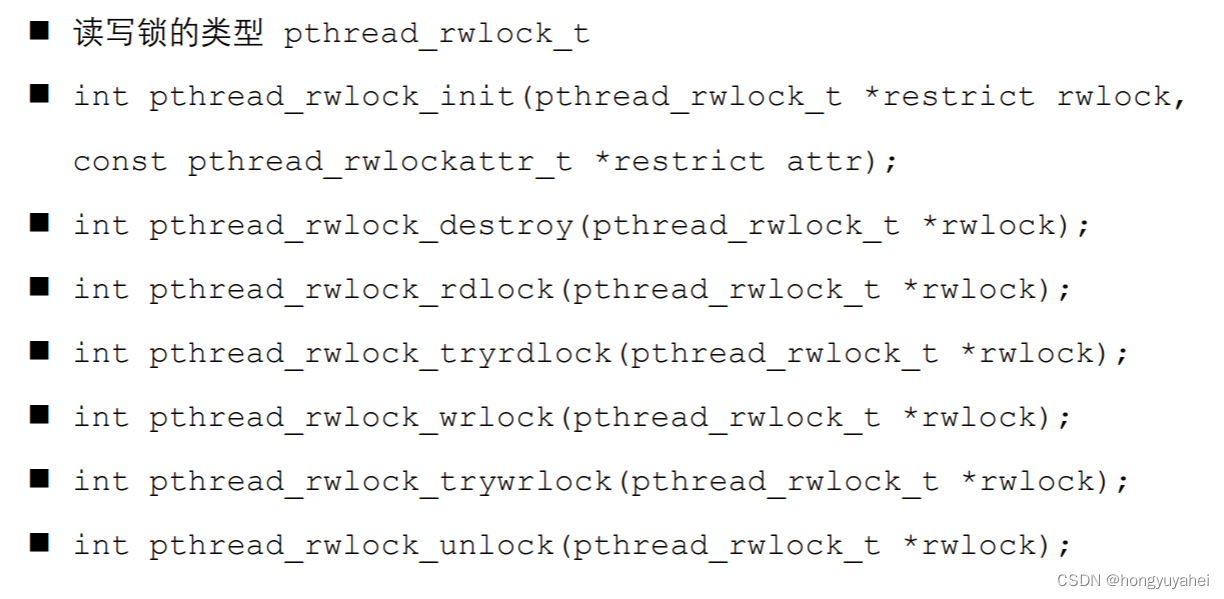
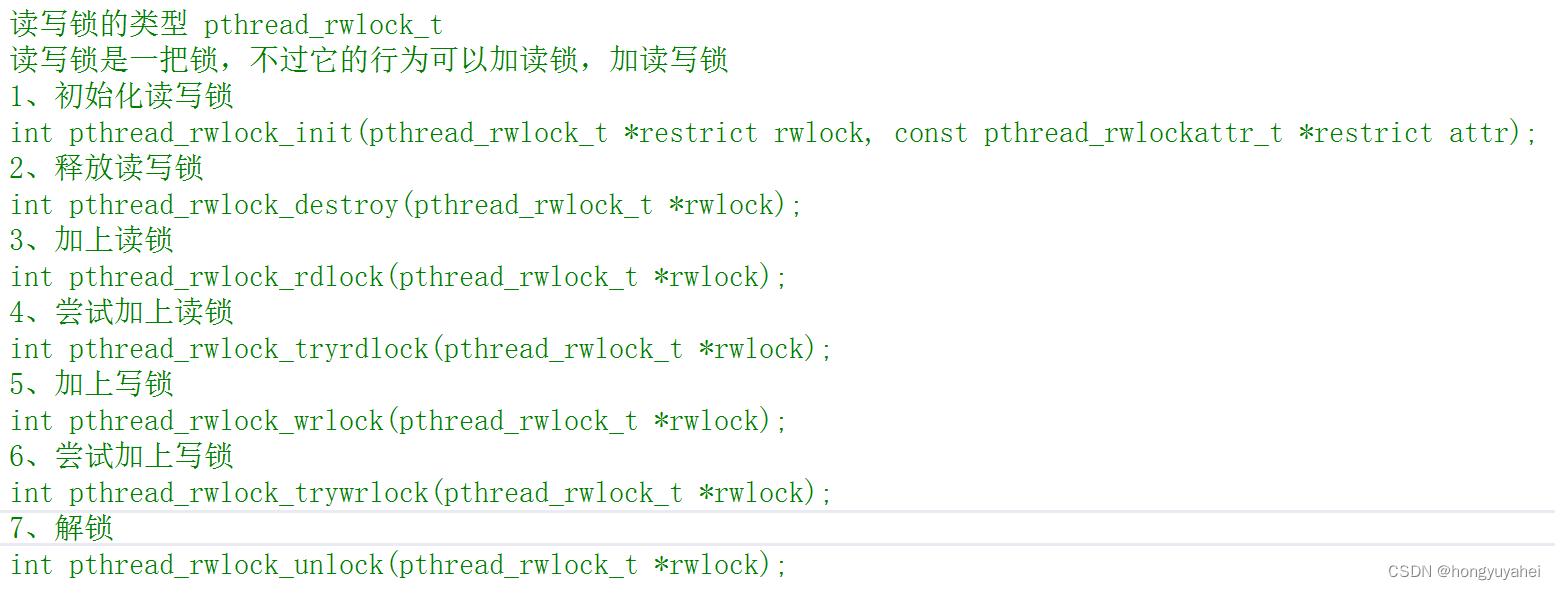
读写锁相关操作函数
代码:
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 创建一个共享数据
int num = 1;
// pthread_mutex_t mutex;
pthread_rwlock_t rwlock;
void * writeNum(void * arg) {
while(1) {
pthread_rwlock_wrlock(&rwlock);
num++;
printf("++write, tid : %ld, num : %d\n", pthread_self(), num);
pthread_rwlock_unlock(&rwlock);
usleep(100);
}
return NULL;
}
void * readNum(void * arg) {
while(1) {
pthread_rwlock_rdlock(&rwlock);
printf("===read, tid : %ld, num : %d\n", pthread_self(), num);
pthread_rwlock_unlock(&rwlock);
usleep(100);
}
return NULL;
}
int main() {
pthread_rwlock_init(&rwlock, NULL);
// 创建3个写线程,5个读线程
pthread_t wtids[3], rtids[5];
for(int i = 0; i < 3; i++) {
pthread_create(&wtids[i], NULL, writeNum, NULL);
}
for(int i = 0; i < 5; i++) {
pthread_create(&rtids[i], NULL, readNum, NULL);
}
// 设置线程分离
for(int i = 0; i < 3; i++) {
pthread_detach(wtids[i]);
}
for(int i = 0; i < 5; i++) {
pthread_detach(rtids[i]);
}
//若不加该语句,return 0的话,主线程的退出会影响子线程的执行
//加上该语句后,主线程的退出不影响子线程的执行
pthread_exit(NULL);
pthread_rwlock_destroy(&rwlock);
return 0;
}
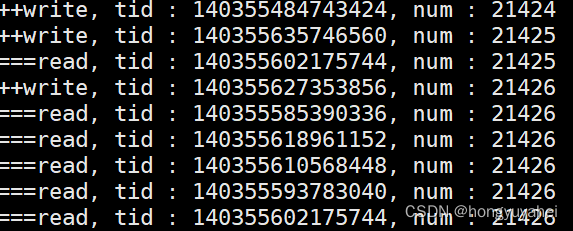
显示结果:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









