




随着自动驾驶技术的快速发展,多传感器的数据采集和融合可以显著提高系统的冗余度和容错性,进而保证决策的快速性和正确性。在项目开发迭代过程中,传感器标定扮演着至关重要的角色,它位于数据采集平台与感知融合算法之间,是确保传感器数据准确性的基础,同时也是实现传感器融合的关键先决条件。
在众多传感器中,相机以其丰富的信息获取能力和成本效益而成为自动驾驶系统中的首选。相机标定可以提高空间定位精度,消除畸变影响,统一传感器数据以及增强系统的鲁棒性。
目录
一、相机的工作原理
通过相机拍摄图像,可以将3D世界投影成2D图像。因此可以把相机模型看作一个从3D空间到2D空间的映射。采用小孔成像模型来描述相机的成像原理。
小孔成像模型由光心、光轴和成像平面几个部分组成,且假设所有成像过程都满足光的直线传播条件。根据光的直线传播理论,空间中的物点反射光经过光心后,投影到平面形成一个倒立的像点。虽然作为理想的成像模型,小孔成像的物理性质极佳,但是实际的相机光学系统中大多是由透镜组成的,在透镜成像中需要满足以下条件:
其中,表示 透镜的焦距,
表示物距,
表示像距,如图1所示。
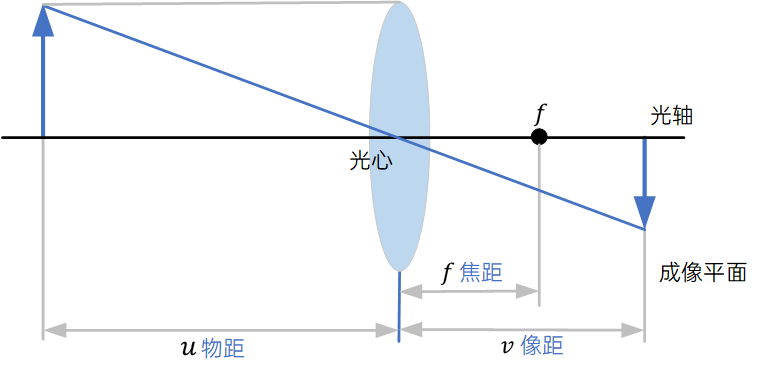
图1 凸透镜成像原理
相机成像系统主要有4个坐标系,分别是世界坐标系、相机坐标系、图像坐标系和像素坐标系,如图2所示。世界坐标系通过平移和旋转得到相机坐标系,相机坐标系通过成像模型中的相似三角形原理得到图像坐标系,图像坐标系通过平移和缩放得到像素坐标系。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 402
402

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









