









using OpenCvSharp.Extensions;
using OpenCvSharp;
using OpenVinoSharp;
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Diagnostics;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using Size = OpenCvSharp.Size;
using OpenCvSharp.Dnn;
using OpenVinoSharp.Extensions.process;
using Point = OpenCvSharp.Point;
using System.IO;
using OpenVinoSharp.Extensions.result;
namespace yolo_world_opencvsharp_net4._8
{
public partial class HandPose2 : Form
{
Core core;
Model model;
CompiledModel compiledModel;
InferRequest inferRequest;
HandDetect handDetect;
string modelPath;
int inHeight;
int inWidth;
const int nPoints = 22;
const double thresh = 0.25;
int[][] posePairs =
{
new[] {0, 1}, new[] {1, 2}, new[] {2, 3}, new[] {3, 4}, //thumb
new[] {0, 5}, new[] {5, 6}, new[] {6, 7}, new[] {7, 8}, //index
new[] {0, 9}, new[] {9, 10}, new[] {10, 11}, new[] {11, 12}, //middle
new[] {0, 13}, new[] {13, 14}, new[] {14, 15}, new[] {15, 16}, //ring
new[] {0, 17}, new[] {17, 18}, new[] {18, 19}, new[] {19, 20}, //small
new[] {5, 9}, new[] {9, 13}, new[] {13, 17}
};
public HandPose2()
{
InitializeComponent();
}
private void HandPose2_Load(object sender, EventArgs e)
{
modelPath = "D:\\caffe-onnx-master\\HandPose_256_256.onnx";
var size = Path.GetFileNameWithoutExtension(modelPath).Split('_').ToList().GetRange(1, 2).Select(x => int.Parse(x));
inWidth = size.First();
inHeight = size.ElementAt(1);
// 初始化 OpenVINO
core = new Core();
// 加载模型
model = core.read_model(modelPath);
compiledModel = core.compile_model(model, "GPU.0");
inferRequest = compiledModel.create_infer_request();
handDetect=new HandDetect();
}
private void button1_Click(object sender, EventArgs e)
{
//predict(new Mat(sampleImage));
}
// 定义手部关键点类
public class HandKeypoints
{
public List<Point> Points { get; set; } = new List<Point>();
public List<double> Confidences { get; set; } = new List<double>();
}
private HandKeypoints Predict(Mat img)
{
Stopwatch stopwatch = Stopwatch.StartNew();
int frameWidth = img.Cols;
int frameHeight = img.Rows;
Mat resized = new Mat();
Cv2.Resize(img, resized, new Size(inWidth, inHeight));
Mat normalized = new Mat();
resized.ConvertTo(normalized, MatType.CV_32FC3, 1.0 / 255.0);
float[] inputData = Permute.run(normalized);
// 创建输入张量
Tensor inputTensor = new Tensor(
inferRequest.get_input_tensor().get_shape(),
inputData
);
// 设置输入并推理
inferRequest.set_input_tensor(0, inputTensor);
inferRequest.infer();
stopwatch.Stop();
Debug.WriteLine($"推理时间: {stopwatch.ElapsedMilliseconds}ms");
// 获取输出
Tensor outputTensor = inferRequest.get_output_tensor(0);
float[] outputData = outputTensor.get_data<float>((int)outputTensor.get_size());
int H = (int)outputTensor.get_shape()[2];
int W = (int)outputTensor.get_shape()[3];
var result = new HandKeypoints();
ReadOnlySpan<float> values = new ReadOnlySpan<float>(outputData);
for (int n = 0; n < nPoints; n++)
{
var probMap = new Mat(H, W, MatType.CV_32F, values.Slice(n * H * W, H * W).ToArray());
Cv2.Resize(probMap, probMap, new Size(frameWidth, frameHeight));
Cv2.MinMaxLoc(probMap, out _, out double maxVal, out _, out Point maxLoc);
if (maxVal > thresh)
{
//result.Points.Add(maxLoc);
result.Confidences.Add(maxVal);
}
else
{
//result.Points.Add(new Point(-1, -1)); // 无效点标记
result.Confidences.Add(0);
}
result.Points.Add(maxLoc);
probMap.Dispose();
}
// 释放资源
resized.Dispose();
normalized.Dispose();
inputTensor.Dispose();
outputTensor.Dispose();
return result;
}
private void button2_Click(object sender, EventArgs e)
{
VideoCapture videoCapture = new VideoCapture(@"D:\3D\1752493178789.mp4");
//videoCapture.FrameWidth = 640;
//videoCapture.FrameHeight = 480;
Mat frame = new Mat();
while (true)
{
videoCapture.Read(frame);
if (frame.Empty()) break;
var result = handDetect.image_predict(frame);
Mat displayFrame = frame.Clone();
for (int i = 0; i < result.datas.Count; i++)
{
Rect handBox = result.datas[i].box;
Cv2.Rectangle(displayFrame, handBox, new Scalar(255, 255, 0), 2);
try
{
Mat handRoi = new Mat(frame, handBox);
HandKeypoints keypoints = Predict(handRoi);
// 转换关键点到原图坐标
List<Point> absolutePoints = keypoints.Points
.Select(p => p != new Point(-1, -1)
? new Point(p.X + handBox.X, p.Y + handBox.Y)
: new Point(-1, -1))
.ToList();
// 在原图上绘制关键点
foreach (var point in absolutePoints)
{
if (point != new Point(-1, -1))
{
Cv2.Circle(displayFrame, point, 5, new Scalar(0, 0, 255), -1);
}
}
// 绘制骨架连线
foreach (var pair in posePairs)
{
Point pt1 = absolutePoints[pair[0]];
Point pt2 = absolutePoints[pair[1]];
if (pt1 != new Point(-1, -1) && pt2 != new Point(-1, -1))
{
Cv2.Line(displayFrame, pt1, pt2, new Scalar(0, 255, 0), 2);
}
}
handRoi.Dispose();
}
catch (Exception ex)
{
Debug.WriteLine($"处理手部区域时出错: {ex.Message}");
}
}
// 显示处理后的帧
pictureBox1.Image?.Dispose();
pictureBox1.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(displayFrame);
Cv2.WaitKey(1);
displayFrame.Dispose();
}
videoCapture.Dispose();
frame.Dispose();
}
private void HandPose2_FormClosing(object sender, FormClosingEventArgs e)
{
inferRequest.Dispose();
compiledModel.Dispose();
model.Dispose();
core.Dispose();
}
}
}
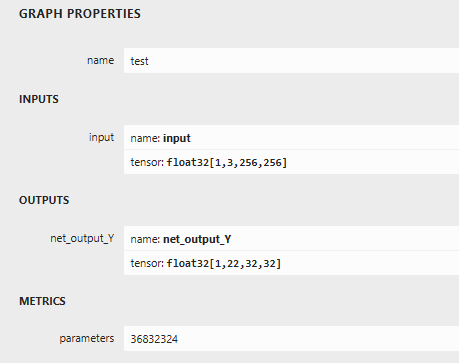
onnx模型由pose_iter_102000.caffemodel pose_deploy.prototxt转换而来,模型输入输出如下
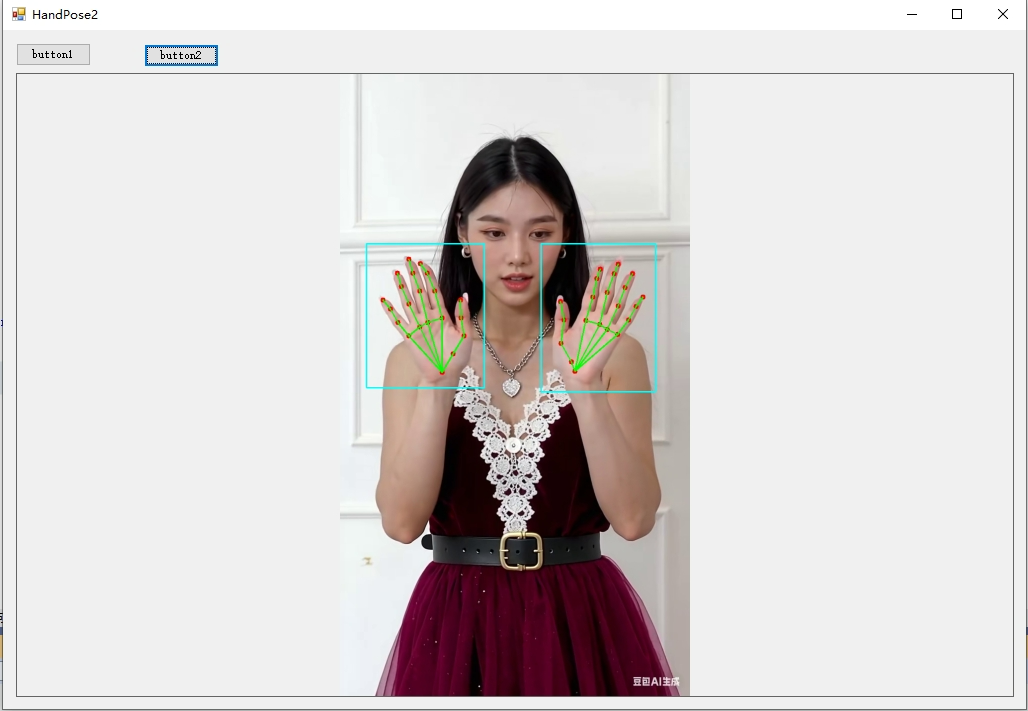
用yolov8进行手部检测(handDetect),检测到手部后,截取手部区域后,进行手部关键点检测


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









