







遥感影像分类常用的评价指标--混淆矩阵
| 预测结果 | |||||
| 类别 | 类1 | 类2 | 类3 | ||
| 真实结果 | 类1 | 24 | 2 | 5 | 31 |
| 类2 | 2 | 27 | 0 | 29 | |
| 类3 | 4 | 2 | 30 | 36 | |
| 30 | 31 | 35 | 81 | ||
类1的用户精度=24/30
类1的制图精度=24/31
类1的漏分误差=(31-24)/31
类1的错分误差=(30-24)/30
总体分类精度=(24+27+30)/(30+31+35)
对于一个二类问题而言,混淆矩阵如下:
| 预测结果 | |||
| TRUE | FALSE | ||
| 真实结果 | TURE | TP | FN |
| FALSE | FP | TN | |
TP--真正例;FN--伪反例;FP--伪正例;TN--真反例;
正确率(precision)=TP/(TP+FP)
召回率(recall)=TP/(TP+FN)
还可以采用ROC曲线对分类精度进行描述,ROC曲线下面积即为AUC
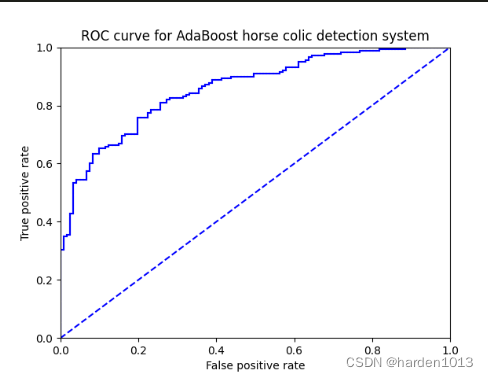
True positive rate = TP/(TP+FN)
False positive rate = FP/(FP+TN)

















 4069
4069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









