



当我们编写一个项目的时候,我们需要同一个样式,如色值。但是我们在编写的时候我们需要编写大量的className,来编写css样式。而且因为css和html分离,我们进行查看的时候总是十分不方便。以及在响应式、主题切换实现十分复杂。
基于以上原因,我们引出了tailwindcss:https://tailwindcss.com/docs/installation/using-vite。一个css可视化工具。
安装tailwindcss
安装命令: npm install -D tailwindcss@3.0.23 postcss@8.4.8 autoprefixer@10.4.2
安装完成后,我们可以使用npx tailwindcss init -p,执行完成后,在项目根目录下会生成tailwind.config.css。
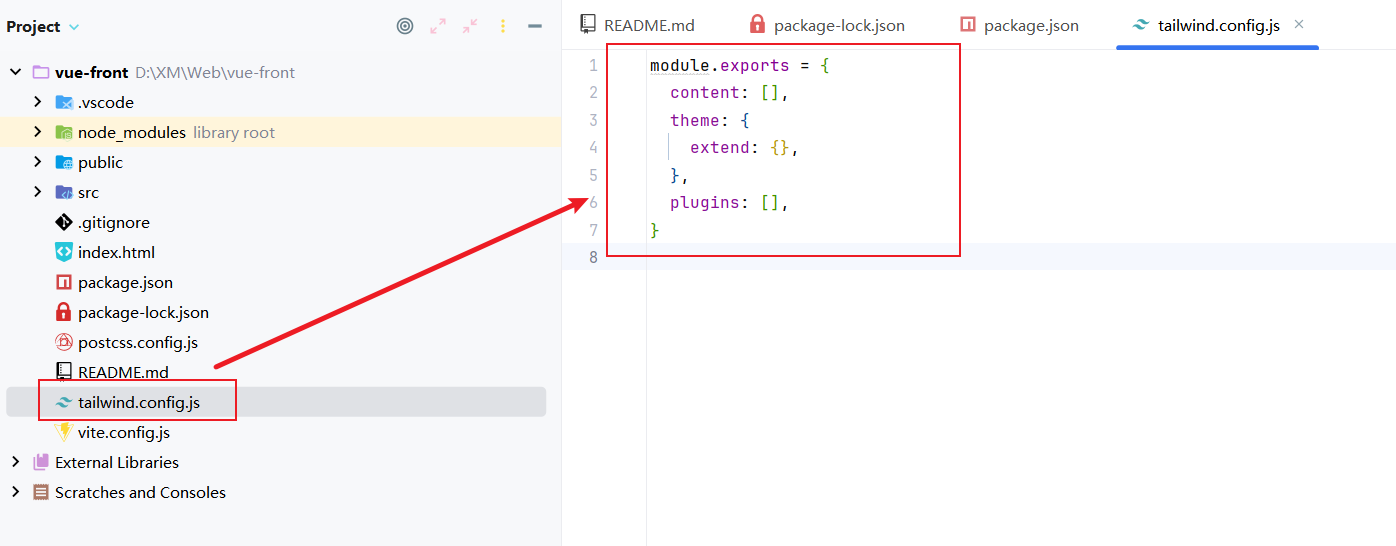
编写以下内容,表示tailwindcss可以用于到此路径
module.exports = {
//tailwind可以应用的地方
content: ['./index.html','./src/**/*.{vue,js}'],
theme: {
extend: {},
},
plugins: [],
}
- content就是来编写可以使用的路径。
在src/index.scss里面引入tailwind基础模块
//导入 tailwind 的基础指令组件
@tailwind base;
@tailwind components;
@tailwind utilities;在main.js里面引入此样式
import { createApp } from 'vue'
import App from './App.vue'
import './styles/index.scss'
createApp(App).mount('#app')
安装sass:npm i -D sass@1.45.0
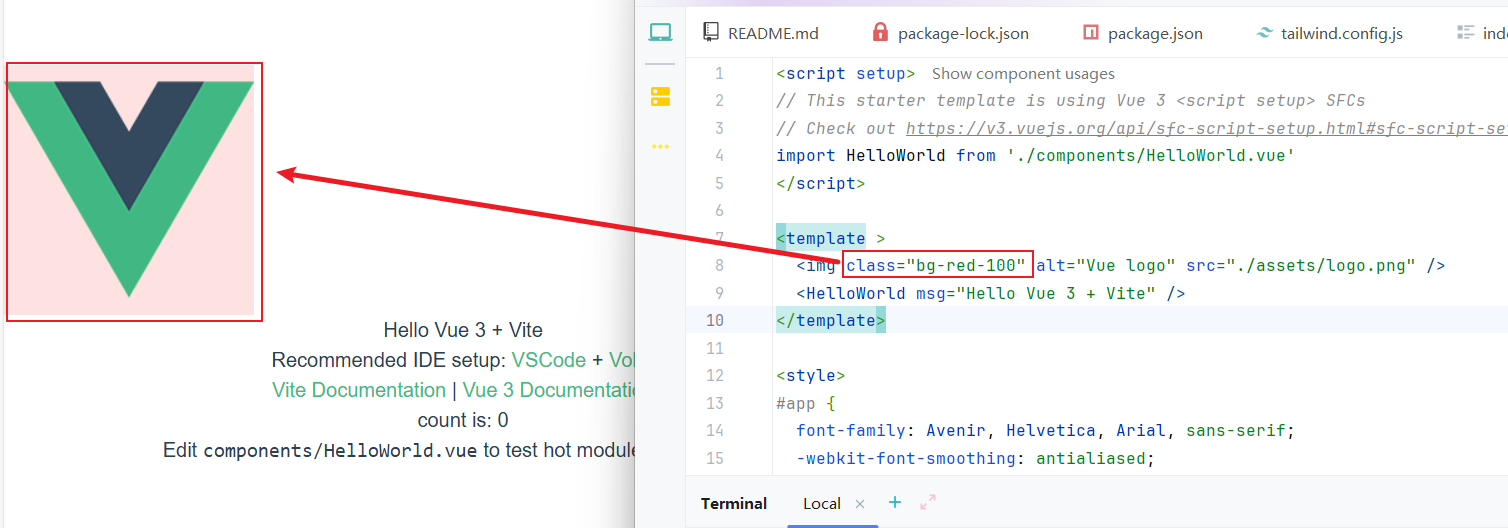
出现以上页面表示tailwindcss安装成功。
tailwind设计理念
颗粒度自上而下组件增大,颗粒度越大则约束性越高,可定制性越弱
- 行内样式:样式全部写入行内。自由度最高,可定制化最强。但是不方便样式的复用。每次都要写整的样式。
- 原子化css:每个类名都代表了一个css属性。自由度依然很强,可定制化依然很高,也方便复用。但是大量的样式会造成大量的类名。
- 传统形式:通过好几个语义化的class来描述一段css。封装性强,语义化强。自由度和可定制化性一般(比如cart标记好一个卡片但是其边框,弧度,阴影都规定好了)。但是大量的html需要大量的语义化class。
- 组件形式:在组件库中极其常见。封装性极强(样式和功能都封装了),语言化强。但是自由度和可定制化较差。
而我们的tailwindcss就是使用了原子化css里面给我们封装了类以便我们使用。
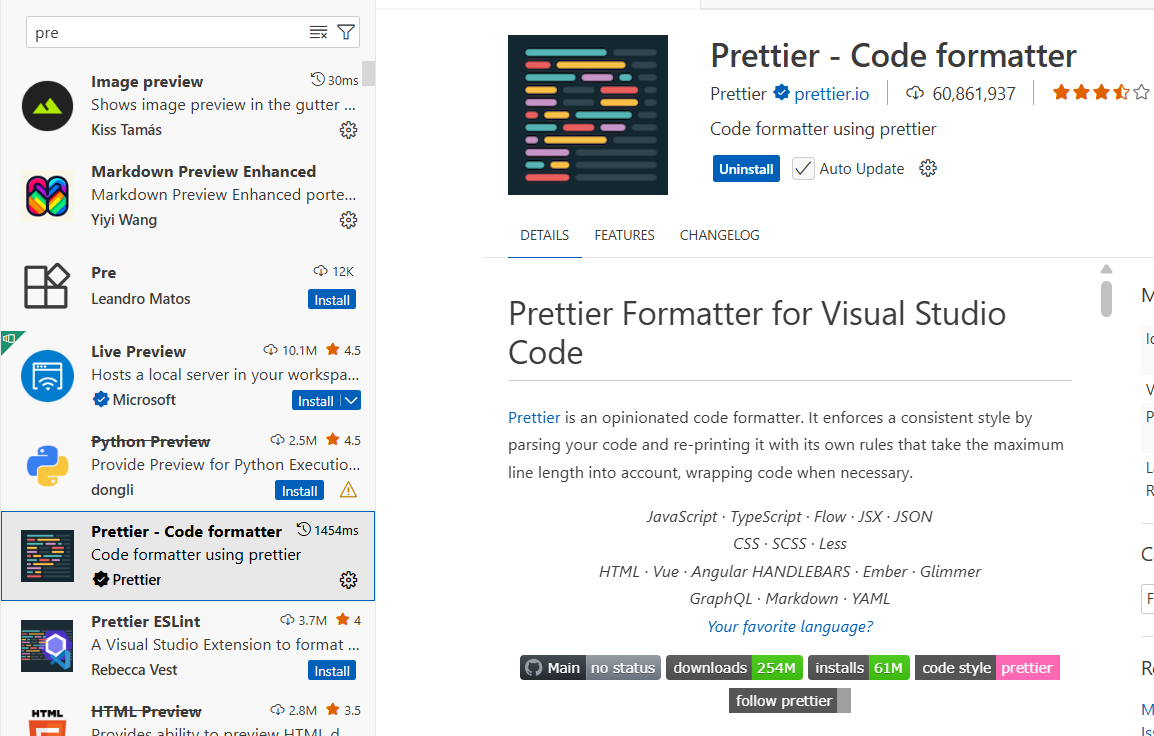
代码样式统一工具Prettier
安装prettier
在项目的根目录下创建.prettierrc文件,并配置以下内容
{
// 代码结尾不加分号
"semi": false,
// 优先单引号
"singleQuote": true,
// 不添加尾随逗号
"trailingComma": "none"
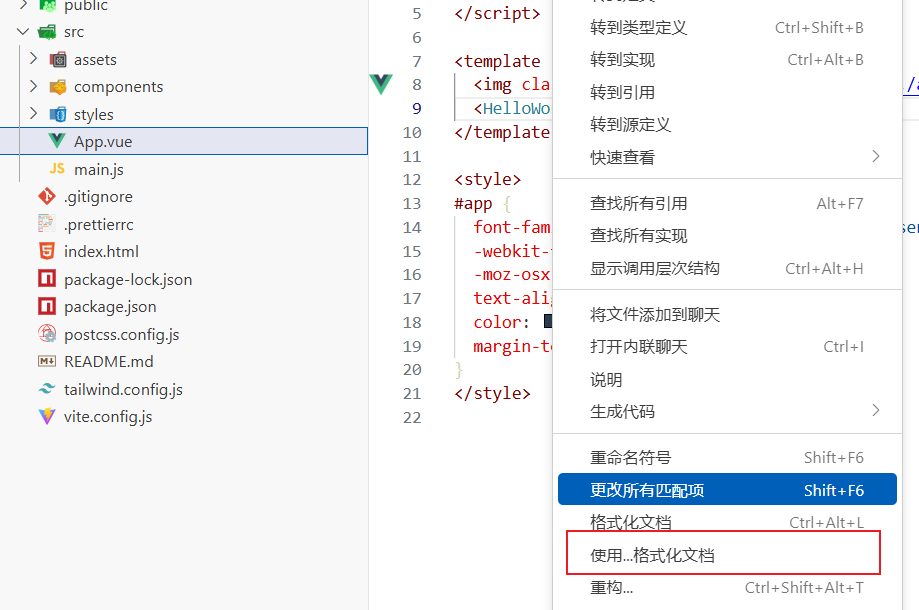
}配置格式代码,鼠标右键点击使用格式化文件
安装tailwindcss插件
项目的基本目录结构
我们需要先安装vue-router和vuex:npm i -save vuex@4.0.2 vue-router@4.0.14
src
├─ App.vue// 项目根组件,一级路由出口
├─ api // 接口请求
├─ assets // 静态资源
│ ├─ icons //svg icon 图标
│ ├─ images //image 图标。比如: xxx.png
│ └─ logo.png//logo
├─ components // 通用的业务组件。比如:一个组件在多个页面中使用到
├─ constants // 常量
├─ directives // 自定义指令
├─ libs // 通用组件,可用于构建中台物料库或通用组件库
├─ main.js// 入口文件
├─ permission.js// 页面权限控制中心
├─ router // 路由
│ ├─ index.js// 路由处理中心
│ └─ modules // 路由模块
│ ├─ mobile-routes.js// 移动端路由
│ └─ pc-routes.js// PC 端路由
├─ store // 全局状态
│ ├─ getters.js// 全局状态访问处理
│ ├─ index.js// 全局状态中心
│ └─ modules // 状态子模块
├─ styles // 全局样式
│ └─ index.scss// 全局通用的样式处理
├─ utils // 工具模块
├─ vendor // 外部供应商资源。比如:人类行为认证
└─ views // 页面组件,与 components 的区别在于:此处组件对应路由由表,以页面的形式展示
└─ layout // 用于 PC 端,分割一级路由和二级路由
├─ components // 该页面组件下的业务组件
└─ index.vue//layout 组件
tailwind.config.js//tailwind css 配置文件,与 src 平级
vite.config.js//vite 配置文件,与 src 平级

















 1051
1051

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









