




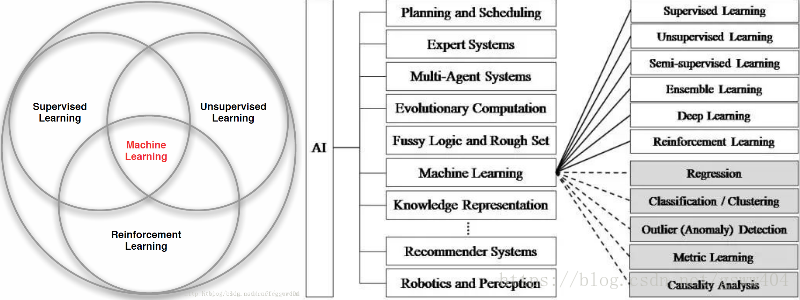
机器学习是人工智能的一个分支,在近30多年已发展为一门多领域交叉学科,涉及概率论、统计学、逼近论、凸分析、计算复杂性理论等的学科。强化学习(RL)作为机器学习的一个子领域,其灵感来源于心理学中的行为主义理论,即智能体如何在环境给予的奖励或惩罚的刺激下,逐步形成对刺激的预期,产生能获得最大利益的习惯性行为。它强调如何基于环境而行动,以取得最大化的预期利益。通俗的讲:就是根据环境学习一套策略,能够最大化期望奖励。由于它具有普适性而被很多领域进行研究,例如自动驾驶,博弈论、控制论、运筹学、信息论、仿真优化、多主体系统学习、群体智能、统计学以及遗传算法。
** RL和监督式学习, 非监督学习之间的区别:**
,其主要分为监督学习、非监督学习、深度学习和强化学习(见图1),其中三个之间的区别在于以下三点:
- (1)、RL并不需要出现正确的输入/输出对,也不需要精确校正次优化的行为。它更加专注于在线规划,需要在探索(在未知的领域)和遵从(现有知识)之间找到平衡,其学习过程是智能体不断的和环境进行交互,不断进行试错的反复练习。
- (2)、RL的不同地方在于:其中没有监督者,只有一个reward信号;反馈是延迟的,不是立即生成的;时间在RL中具有重要的意义。
- (3)、 RL并不需要带有标签的数据,有可以交互的环境即可。
基于此,普通机器学习方法和强化学习之间的的关系已描述清楚。我们知道机器学习算法和深度学习可以做分类,回归、时间序列等经典问题,这已经在很多应用场景,例如语音、文字语义等基础性的人类认知方面取得非常大的突破,但是为什么还要学习强化学习呢?不得不从其应用场景说起。
RL目前的应用场景:
- 自动驾驶: 自动驾驶载具(self-driving vehicle)
- 控制论(离散和连续大动作空间): 玩具直升机、Gymm_cotrol物理部件控制、机器人行走、机械臂控制。
- 游戏: Go, Atari 2600(DeepMind论文详解)等
- 理解机器学习: 自然语言识别和处理, 文本序列预测
- 超参数学习: 神经网络参数自动设计
- 问答系统: 对话系统
- 推荐系统: 阿里巴巴黄皮书(商品推荐),广告投放。
- 智能电网: 电网负荷调试, 调度等
- 通信网络: 动态路由, 流量分配等
- 物理化学实验: 定量实验,核素碰撞,粒子束流调试等
- 程序学习和网络安全: 网络攻防等
说了这么多,都是关于其背景和应用场景的话题(相关论文见RL-an overview中),那么到底什么是RL, 又是怎么工作的? 以及工作过程中会受那些因素的影响呢? 下文继续回到Rl主题上.
一、强化学习基本组成及原理
1.1、RL结构图:
RL是一种智能体和环境之间不断试错的方法, 通过不断的交互以取得最大的累计期望奖励,它由环境, 智能体和奖励尺度三部分组成,见图:
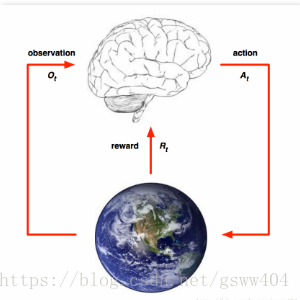
在图中, 大脑部分代表智能体(Agent), 地球代表环境(Environment)
执行过程: 智能体(Agent)通常从环境中获取一个 O t O_{t} Ot, 然后Agent根据 O t O_{t} Ot调整自身的策略做出一个行为(Action: A t A_{t} At)反馈给环境, 环境根据Agent的动作给予Agent一个奖励 R t R_{t} Rt,经过这样,智能体和环境之间进行连续的交互学习,得到了一个{
O , A , R O,A,R O,A,R}的交互历史序列。通常历史序列由观测、行为、奖励三部分组成,被定义为:
H t = O 1 , A 1 , R 1 , … , O t , A t , R t H_{t} = O_{1},A_{1},R_{1},\dots, O_{t},A_{t},R_{t} Ht=O1,A1,R1,…,Ot,At,Rt
同时状态被定义为函数 f ( ⋅ ) f(\cdot) f(⋅)的映射: S t = f ( H t ) S_{t} = f(H_{t}) St=f(Ht),接下来将会对序列通过MDP进行描述:
1.2、马尔科夫决策过程(MDP)
马尔科夫决策过程是一个序列决策问题,它由很多的马尔科夫过程元组组成。 首先了解几个名词:
马尔科夫性: 指系统的下一个状态 S t + 1 S_{t+1} St+1 仅与当前状态 s t s_{t} st有关,表示为:
P [ S t + 1 ∣ S t ] = P [ S t + 1 ∣ s 1 , s 2 , . . . , s t ] (1) P[S_{t+1}|S_{t}] = P[S_{t+1}|s_{1},s_{2},...,s_{t}] \tag{1} P[St+1∣St]=P[St+1∣s1,s2,...,st](1)
** 马尔科夫过程:** 它是一个二元组 ( S , P ) (S, P) (S,P), 其中 S S S为有限状态机, P P P为状态转移概率。且状态转移概率矩阵为:
P = [ P 11 … P 1 n . . . . P n 1 … P n n ] (2) P=\left[ \begin{matrix} P_{11} & \dots & P_{1n} \\ . & & . \\ . & & . \\ P_{n1} & \dots & P_{nn} \end{matrix} \right] \tag{2} P=⎣⎢⎢⎡P11..Pn1……P1n..Pnn⎦⎥⎥⎤(2)
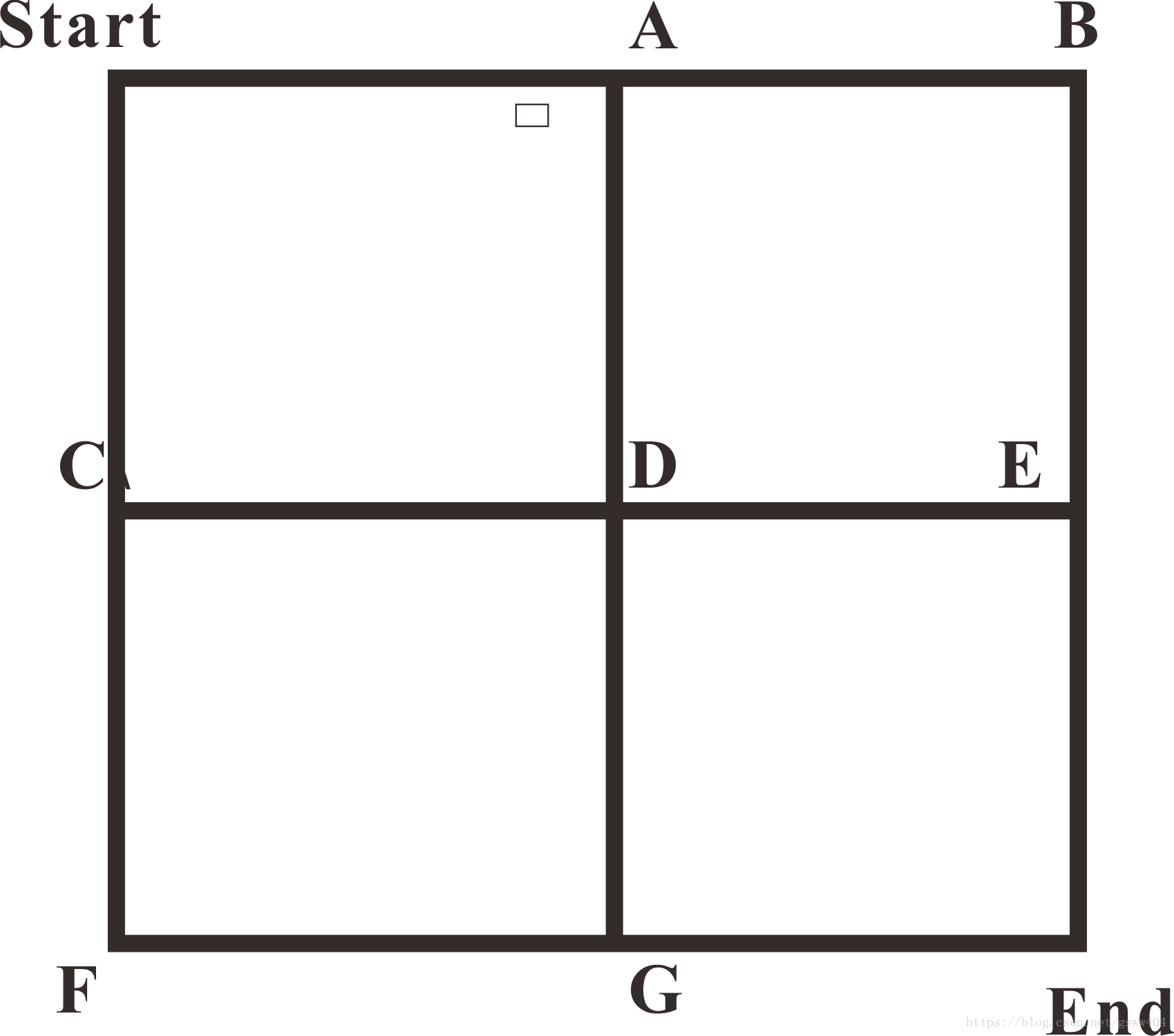
举个例子说明一下(如图):如果给定状态转移概率矩阵P,即每个点到下一个点的状态转移概率,那么从Start出发到End结束存在多条马尔科夫链(多条路径),其中每个链上就是马尔科夫过程的描述。但马尔科夫过程中并不存在action和奖励。因此,从Start开始到end是一个序列决策问题,需要不断的选择路线,以取得最大收益。接下来是MDP
 **马尔科夫决策过程(MDP):** 通常情况马尔科夫决策过程用元组<$S,A,P,R,\gamma$>描述: $S$: 有限状态集 $A$:有限动作集 $P$:状态转移概率 $R$:回报函数 $\gamma$:折扣因子,用来计算累计回报。
**马尔科夫决策过程(MDP):** 通常情况马尔科夫决策过程用元组<$S,A,P,R,\gamma$>描述: $S$: 有限状态集 $A$:有限动作集 $P$:状态转移概率 $R$:回报函数 $\gamma$:折扣因子,用来计算累计回报。
上述是MDP的组成,而我们关心的是它如何工作,继续前面的走方格例子,从Start开始,有两个行为(向右走,向南走),走不通的方向都有 P = 1 4 P= \frac{1}{4} P=41的概率且有不同的奖励,一直反复的走,直到走到End结束,在这个过程中会形成不同的序列,例如序列1:
{ ( S t a r t , R i g h t , P , R 1 ) , ( A , R i g h t , P , R 2 ) , ( B , S o u t h , P , R 3 ) , ( E , S o u t h , P , R 4 ) , ( E n d , S o u t h , P , R 5 ) } \left\{(Start,Right,P,R1),(A,Right,P,R2),(B,South,P,R3),(E,South,P,R4), (End,South,P,R5)\right\} {
(Start,Right,P,R1),(A,Right,P,R2),(B,South,P,R3),(E,South,P,R4),(End,South,P,R5)}
这只是其中一条路径,那从Start到End那条路劲带来的收益最大呢?就需要每一步进行决策,而决策就需要用到策略。下文继续:
1.3、强化学习的目标及Agent的要素:
目标: 根据环境状态序列,找到一套最优控制策略,以实现最大累计期望奖励。
1.3.1 第一要素 ---- 策略
那么什么是策略呢? 通常情况下被定义为是从状态到行为的一个映射,直白说就是每个状态下指定一个动作概率,这个可以是确定性的(一个确定动作),也可以是不确定性的。
(1)非确定策略: 对于相同的状态,其输出的状态并不唯一,而是满足一定的概率分布,从而导致即使是处在相同的状态,也可能输出不同的动作,表示为:
π ( a ∣ s ) = P [ A t = a ∣ S t = s ] (3) \pi(a|s) = P[A_{t}=a|S_{t}=s] \tag{3} π(a∣s)=P[At=a∣St=s](3)
(2)确定行策略: 在相同的状态下,其输出的动作是确定的,表示为:
a = π ( s ) (4) a = \pi (s) \tag{4} a=π(s)(4)
如果给定一个策略,就可以计算最大化累计期望奖励了,通常奖励分为及时奖励和长久累计期望奖励,
**及时奖励:**实时反馈给Agent的奖励 r t r_{t} rt,举例:当玩具直升机根据当前的作态做出一个飞行控制姿势时,好坏会立即得到一个奖励。
**累计期望奖励:**通常指一个过程的总奖励的期望,比如直升机从飞起到降落整个过程。
通常累计期望奖励被定义为:
G t = R 1 + γ R 2 + γ 2 R 3 + ⋯ + γ k − 1 R k = ∑ k = 0 γ k R t + k + 1 (5) G_{t} = R_{1}+\gamma R_{2}+\gamma^{2}R_{3}+\cdots+\gamma^{k-1}R_{k}=\sum_{k=0}^{}\gamma^{k}R_{t+k+1} \tag{5} Gt=R1+γR2+γ2R3+⋯+γk−1Rk=k=0∑γkRt+k+1(5)
假如在策略 π \pi π下,从前文的Start出发,则有不同的路径
S t a r t → A → B → E → E n d S t a r t → C → D → G → E n d . . . . Start \rightarrow A \rightarrow B \rightarrow E \rightarrow End \\ Start \rightarrow C \rightarrow D \rightarrow G \rightarrow End \\ .... Start→A→B→E→EndStart→C→D→G→End....
每个路径的累计回报 G t G_{t} Gt不同,且在随机策略下 G t G_{t} Gt是随机变量,但它们的期望是一个确定值,因此而被用作值函数的估计。
1.3.2 第二要素 ---- 值函数
当Agent采用某个策略
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 3661
3661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











