




 雅培信息推出STARLIMSSDMSV12.2,旨在帮助客户满足FDA等监管机构的数据完整性要求。此版本可与现有的LIMS系统一起使用或作为独立产品运行,支持多种实验室系统的集成,无需替换原有系统。适用于已购买STARLIMS的用户、拥有LIMS但缺乏SDMS的组织以及计划采用独立SDMS方案管理数据的组织。
雅培信息推出STARLIMSSDMSV12.2,旨在帮助客户满足FDA等监管机构的数据完整性要求。此版本可与现有的LIMS系统一起使用或作为独立产品运行,支持多种实验室系统的集成,无需替换原有系统。适用于已购买STARLIMS的用户、拥有LIMS但缺乏SDMS的组织以及计划采用独立SDMS方案管理数据的组织。
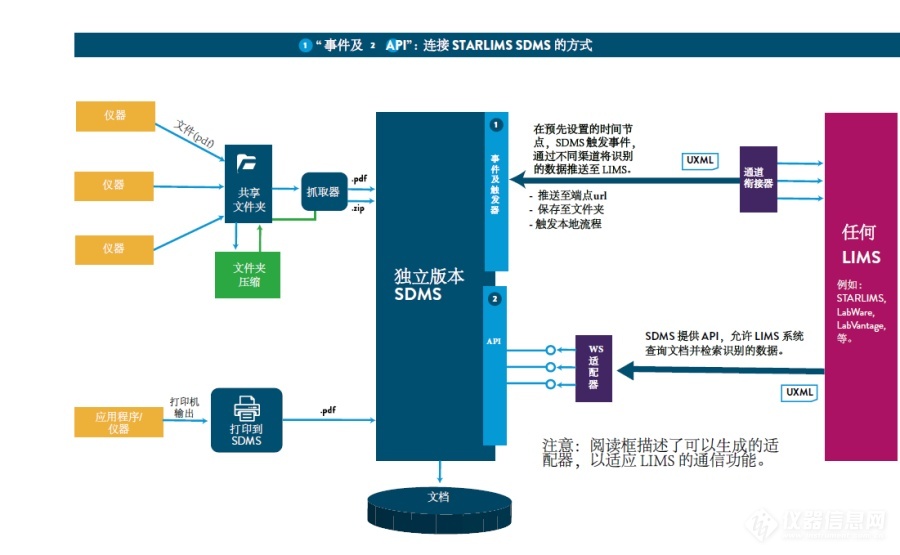
雅培信息正式发布 STARLIMS SDMS (科学数据管理系统) V12.2。作为雅培信息 STARLIMS 一体化解决方案的一个组成部分,最新版本的 SDMS 还可以独立产品的形式帮助客户满足美国食品药品管理局(FDA)以及其他监管机构对数据完整性的要求。STARLIMS SDMS V12.2 可以与现有 LIMS 一起运行,也可以独立运行。它通过 webservice 高效地与所有 LIMS (实验室信息管理系统)、 CDS (色谱数据系统)、 ELN (电子实验室笔记本)、 SAP 和其他实验室系统集成,无需替换它们。
以下三类客户将从 STARLIMS SDMS V12.2 获益:
•已经购买了包含SDMS在内的STARLIMS 的用户;
•拥有LIMS,但缺乏SDMS组件的组织;
•尚未使用LIMS,但计划使用独立版本的SDMS解决方案以管理其数据并更好地满足监管要求的组织。
雅培信息专门设计该解决方案,以帮助客户遵从 21 CFR PART 11 规范; 确保合规记录的创建、审计追踪、电子签名和数据安全,并为客户提供以下功能:
•以自有格式展示并存储设备数据文件。
•解析数据,包括可提取的元数据。
•无需工作站软件即可创建记录。
•在数据被存储或发送到其他应用程序之前对其进行审核。
STARLIMS 独立版本的 SDMS 可以独立运行或与 LIMS 系统集成,通过实时采集和备份数据,保护数据防止其损坏和丢失,并维护原始数据作为原始记录,以实现数据完整性。所有这些功能将帮助客户确保质量控制,减少出错并符合监管要求。

















 894
894

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









