






推荐开源项目:rqt_virtual_joystick —— 您的虚拟操控台
rqt_virtual_joystick  项目地址: https://gitcode.com/gh_mirrors/rq/rqt_virtual_joystick
项目地址: https://gitcode.com/gh_mirrors/rq/rqt_virtual_joystick
在开源世界中,总有那些小巧却极具创意的工具,让人眼前一亮。今天,让我们一同探索一款名为rqt_virtual_joystick的项目,它为ROS(Robot Operating System)生态系统带来了新的活力。
项目介绍
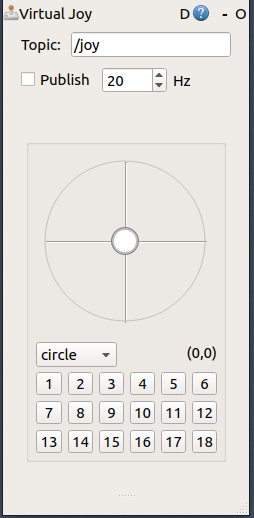
rqt_virtual_joystick是一个简洁高效的Ros包,它模拟了一个虚拟的操纵杆,并能够发送标准的sensor_msgs/Joy消息。对于任何需要人工控制或测试机器人应用的场景,它都是一个不可或缺的工具。通过直观的界面,用户可以轻松实现对机器人的远程操作,无需实体硬件的限制,极大地提升了开发和调试的灵活性。
项目技术分析
基于ROS的强大支持,rqt_virtual_joystick利用了ROS的标准消息类型sensor_msgs/Joy来模拟发送操纵杆数据。其核心在于高效的消息发布机制,允许开发者通过命令行参数定制初始发布的主题名称、频率以及选择不同的虚拟操纵杆样式(圆形或方形),展现出良好的可配置性。采用Python编写,使得维护与扩展更为简便。
项目及技术应用场景
这个项目的应用场景广泛而灵活。在机器人教育和研究领域,它能作为快速原型测试的工具,让开发者在没有物理操纵杆的情况下进行算法验证。在远程控制无人机、地面机器人或是实验室内的机械臂时,rqt_virtual_joystick提供了一种低成本且高效的解决方案。此外,在紧急情况下或是在难以布置实物操纵环境的场合,其价值尤为显著。
项目特点
- 易用性:用户友好的图形界面,简单启动命令即可开始操作。
- 灵活性:支持自定义发布话题、发送速率以及虚拟操纵杆的形状,满足不同需求。
- 轻量级:基于ROS的插件设计,便于集成至现有系统,不会增加过多资源消耗。
- 开源与兼容性:遵循MIT许可,源代码开放,易于二次开发;完美适配ROS环境,兼容多种ROS版本。
- 图标美观:采用Tango Project的图标,提升用户体验的同时尊重开源精神。
rqt_virtual_joystick以其独特的便捷性和强大的功能性,成为ROS社区中的明星小工具。不论是 Robotics初学者还是经验丰富的开发者,都能从中找到提升效率的新途径。立即尝试,解锁远程控制的新体验,让你的机器人项目更加得心应手。
rqt_virtual_joystick 项目地址: https://gitcode.com/gh_mirrors/rq/rqt_virtual_joystick
创作声明:本文部分内容由AI辅助生成(AIGC),仅供参考





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











