






探索三维世界的语义钥匙:3D场景图
去发现同类优质开源项目:https://gitcode.com/
在数字世界与现实世界的桥梁上,斯坦福大学的研究团队推出了一项革命性的创新——3D场景图。这项技术为虚拟环境中的对象赋予了全新的生命,通过统一的语义结构,将三维空间、相机视角和丰富语义紧密结合,开启了机器人和AI研究的新篇章。
项目介绍
3D场景图是专为Gibson环境设计的,它提供了一个详尽的模型语义数据集,让开发者能够更加精准地理解并交互于这些复杂的3D环境中。该数据集不仅涵盖了经过众包验证的小型Gibson分割数据,还提供了自动化处理其他模型的语义信息,尽管后者不包括完全依赖人工输入的细节,如材质和纹理。
项目技术分析
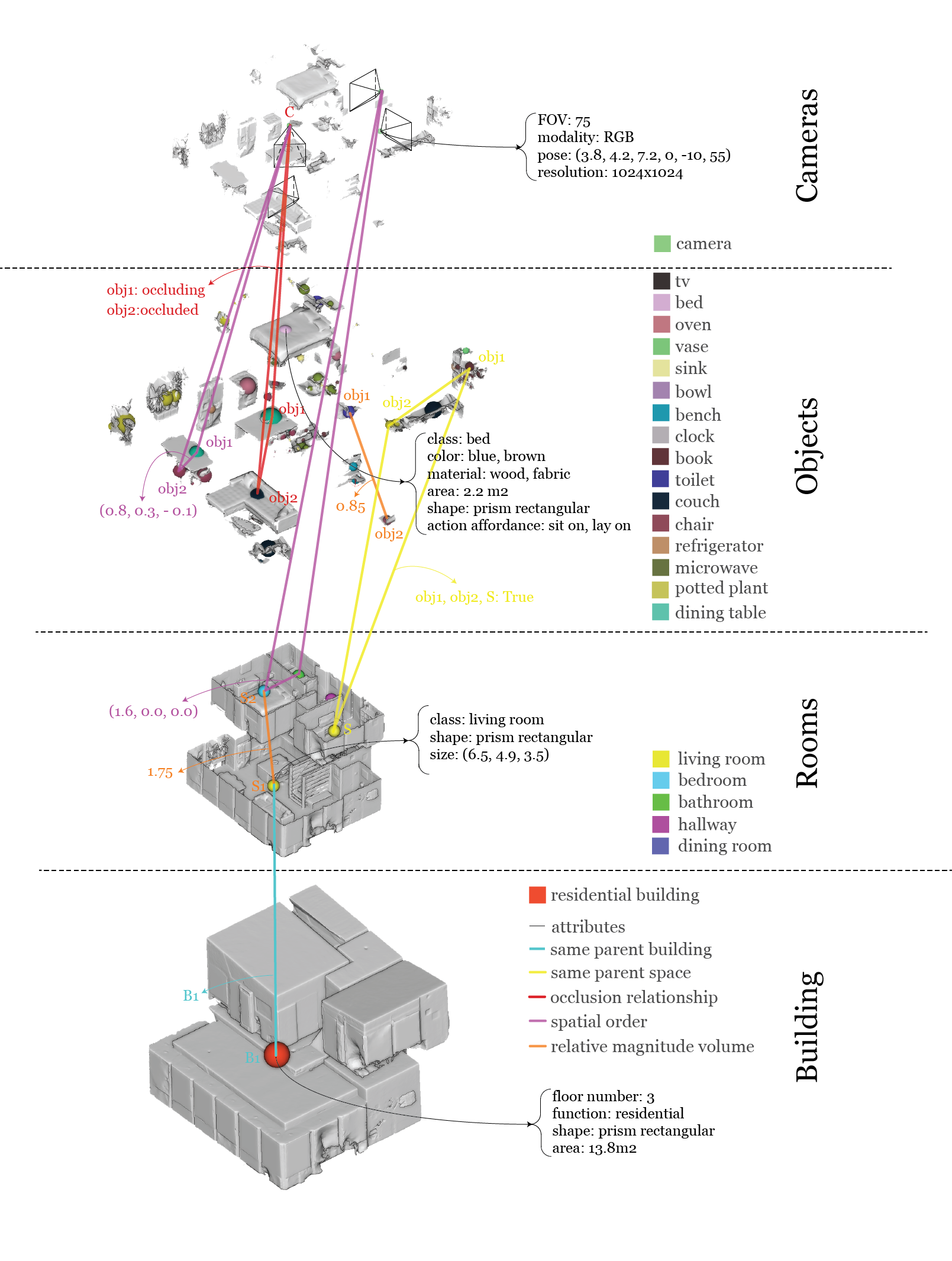
这一项目的核心在于构建四层结构的3D场景图,即建筑层、房间层、对象层和摄像头层。每层都承载着特定的语义信息,从建筑物的整体尺寸、功能到每个物体的位置、类别、材质乃至摄像头的视场角,形成了一个全面且层次分明的数据框架。利用numpy的压缩*.npz格式存储,便于高效访问和处理。这不仅是对空间数据的记录,更是赋予机器理解复杂场景的能力。
应用场景
3D场景图的应用广泛而深远,从智能家居的设计评估,到虚拟现实(VR)体验的增强,再到自动导航系统中对于环境的理解,无处不在。特别是在机器人学领域,它能帮助机器人在真实的或模拟的环境中更好地定位自身,理解其周围的物理世界。此外,对于城市规划、室内设计、以及AI视觉系统的训练,3D场景图都是不可或缺的工具。
项目特点
- 统一语义结构:通过统一的框架整合三维空间中的各种信息,促进了数据的解读和应用。
- 深度语义信息:涵盖对象类别的COCO标准,材料来自Materials in Context数据库,纹理引用Describable Textures Dataset,确保了高精度的环境描述。
- 自动化与验证结合:小规模模型的手动校验保证高质量数据的同时,大规模模型则依赖自动化方法,兼顾效率和准确性。
- 兼容性与开放性:提供Python加载脚本和依赖说明,方便研发者快速集成至自己的项目中,推动技术创新。
如何获取?
只需同意许可协议,即可通过提供的链接下载3D场景图数据,开始你的探索之旅。记得,这份宝藏仅供非商业研究使用。
在这一强大工具的支持下,无论是学术研究还是产品开发,都将迎来新的突破。3D场景图以其独特的设计理念和技术深度,正等待每一位创新者去挖掘它的无限可能。立即加入探索三维世界深层次语义的行列,解锁未来智能技术的新篇章。
去发现同类优质开源项目:https://gitcode.com/
创作声明:本文部分内容由AI辅助生成(AIGC),仅供参考





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











