学习GC之前
最新推荐文章于 2025-08-15 16:49:21 发布




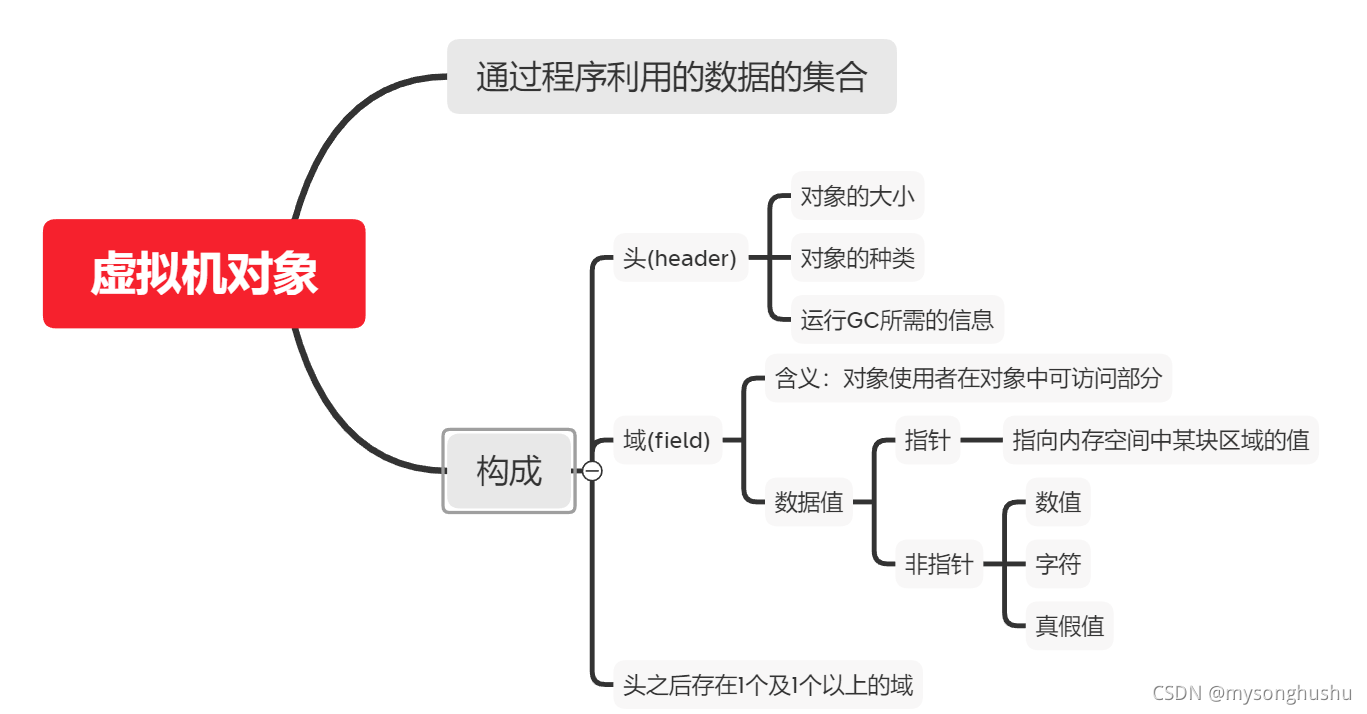
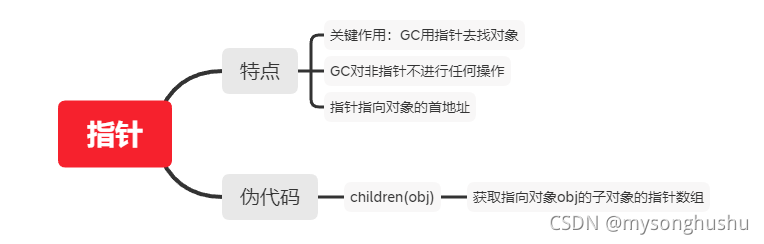
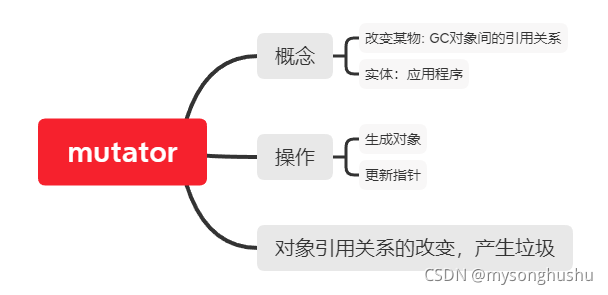
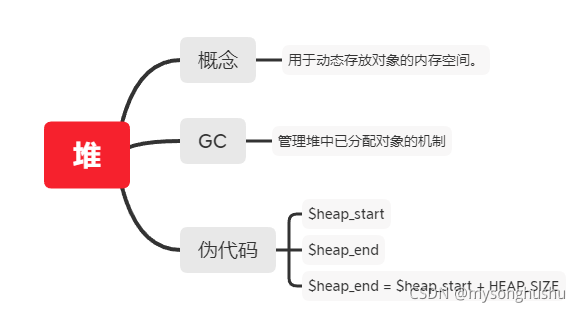
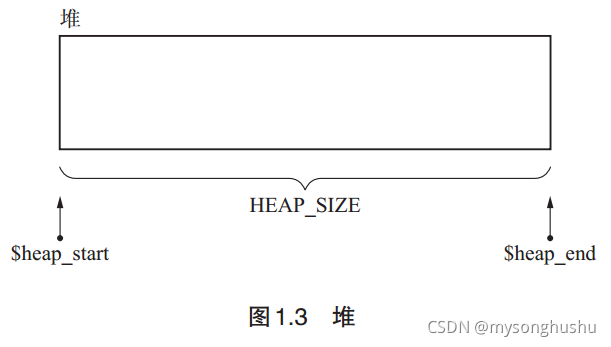
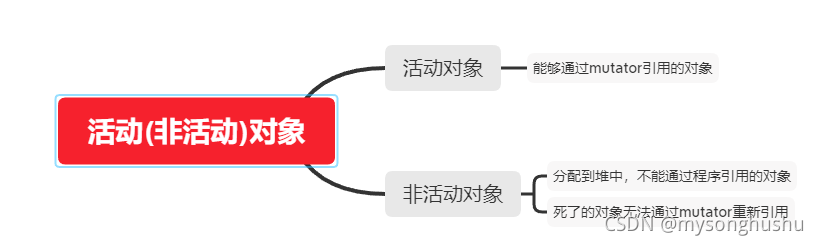
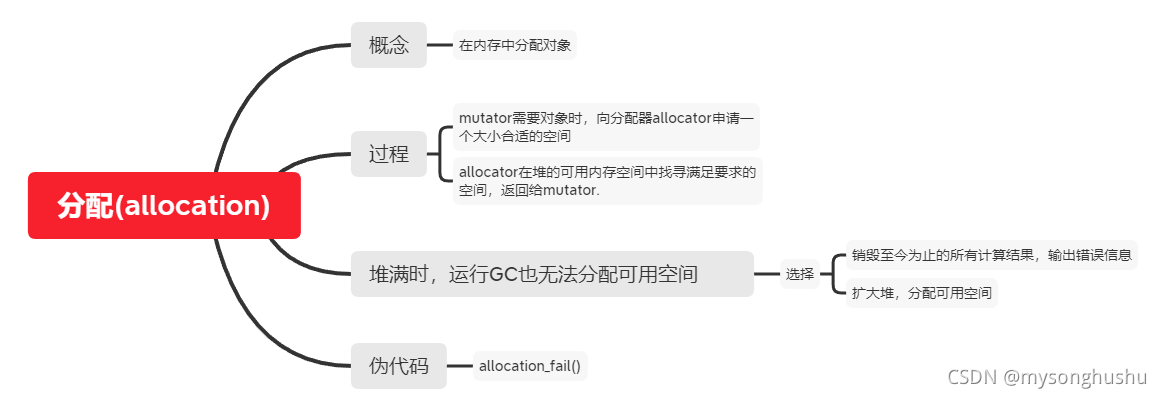
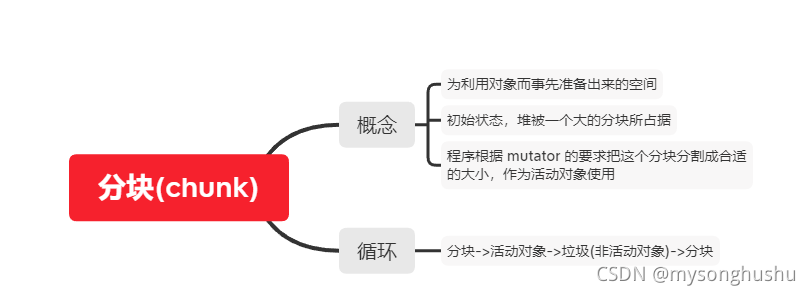
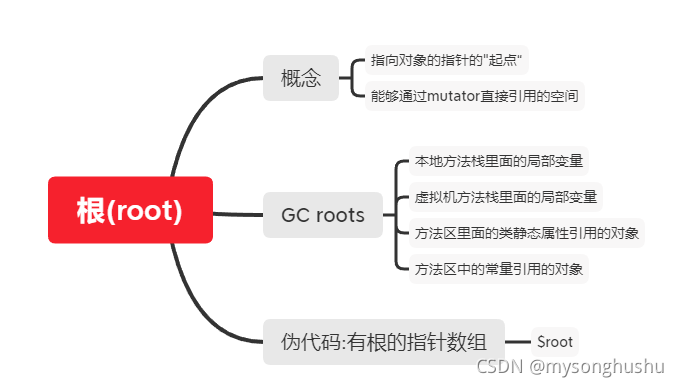
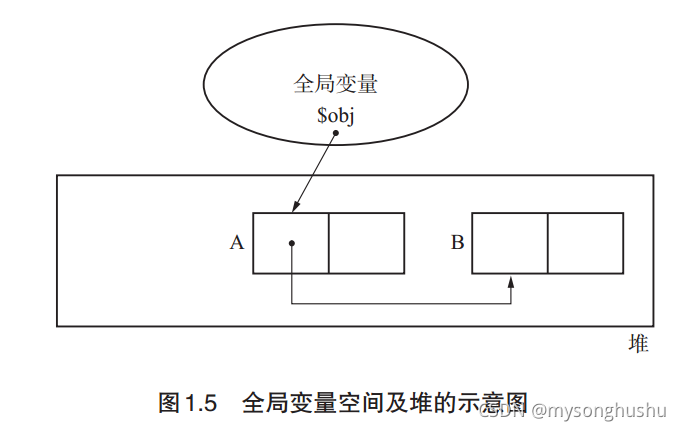
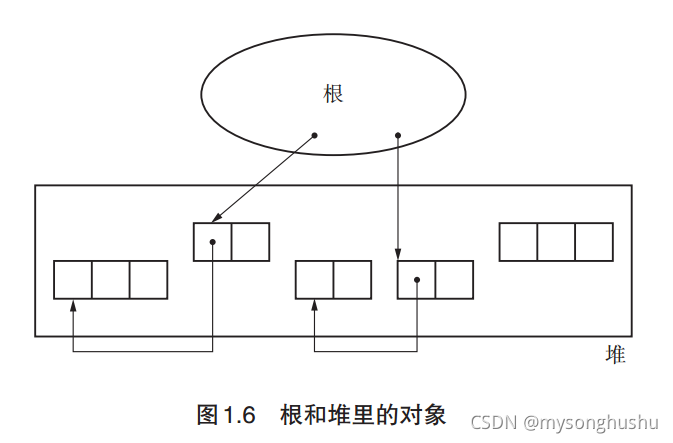
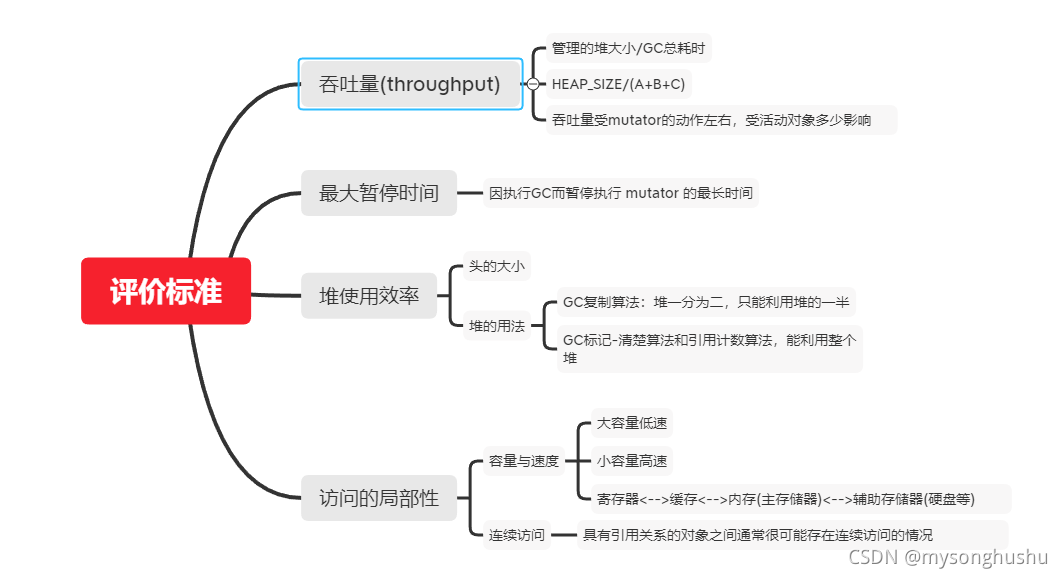
 本文深入探讨了内存管理的关键概念,包括虚拟机对象、指针、mutator、堆以及活动与非活动对象的区分。通过示例解释了对象分配、分块和根的概念,如创建和赋值全局变量的过程。讨论了评价内存管理效率的标准,为理解程序运行时的内存行为提供了基础。
本文深入探讨了内存管理的关键概念,包括虚拟机对象、指针、mutator、堆以及活动与非活动对象的区分。通过示例解释了对象分配、分块和根的概念,如创建和赋值全局变量的过程。讨论了评价内存管理效率的标准,为理解程序运行时的内存行为提供了基础。
本文深入探讨了内存管理的关键概念,包括虚拟机对象、指针、mutator、堆以及活动与非活动对象的区分。通过示例解释了对象分配、分块和根的概念,如创建和赋值全局变量的过程。讨论了评价内存管理效率的标准,为理解程序运行时的内存行为提供了基础。
本文深入探讨了内存管理的关键概念,包括虚拟机对象、指针、mutator、堆以及活动与非活动对象的区分。通过示例解释了对象分配、分块和根的概念,如创建和赋值全局变量的过程。讨论了评价内存管理效率的标准,为理解程序运行时的内存行为提供了基础。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 2240
2240





