



这两种模块都具有高精度、低功耗和紧凑的尺寸。

Ai-Thinker开发的60G雷达系列模块是60GHz毫米波雷达,有两个模块:Rd-60和Rd-61。
这两种模块都具有高精度、低功耗和紧凑的尺寸。它们带有集成雷达天线,并采用表面安装或通孔设计,允许灵活安装。使用UART Shell控制命令,可以离线调整参数无需编程即可执行的。支持FFT雷达检测数据输出,可用于睡眠呼吸暂停检测、跌倒报警、心率检测、人体运动检测等应用场景。

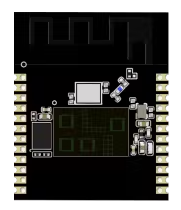
Rd-60
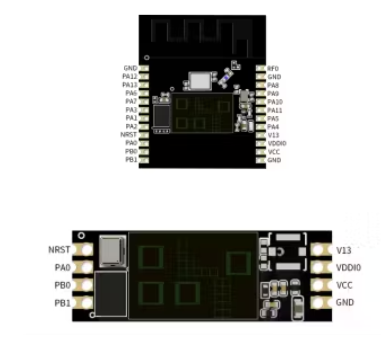
•封装:SMD-24,可表面安装或通孔安装
•引脚间距:1.27mm
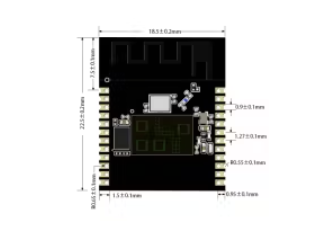
•大小:18.5 x22.5mm
•支持串口输出
•高精度检测(最小阈值8.3cm)
•支持FFT显示支持点云数据显示
•16个可用IOs
•支持二次开发
•低功耗(28uA)
•提供测试主机软件,点击查看效果
•支持串口Shell命令控制
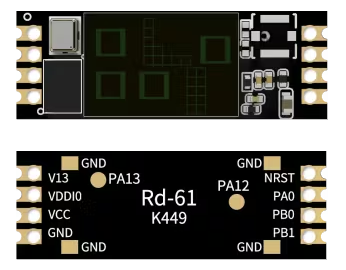
Rd-61
•封装:SMD-8,可表面安装或通孔
•引脚间距:1.27mm
•大小:6.5 x18.5mm
•支持串口输出
•高精度检测(最小阈值8.3cm)
•支持FFT显示
•支持点云数据显示
•3个可用的IOs
•支持二次开发
•支持低功耗检测(28uA)
•提供测试主机软件,点击查看效果
•支持串口Shell命令控制
Rd-60-Kit
•Rd-60-Kit是Ai-Thinker为Rd-60/61模块设计的开发板。
•支持Rd-60模块接口
•支持Rd-61模块接口
•双TTL接口,支持命令发送和数据输出
•支持低功耗测试
•能否连接上位机进行数据监控
•支持最高2M bps的波特率
•所有可用的接口都被调出
•一组led被带出来作为识别提示
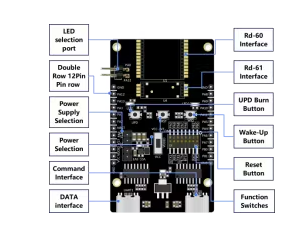
界面图
引脚图
大小

















 970
970

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









