




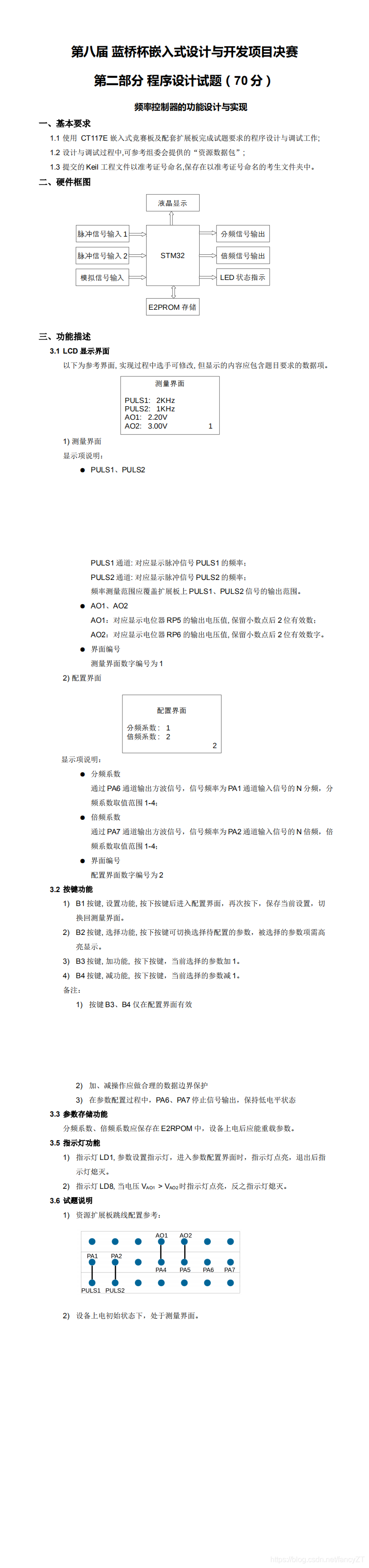
一、题目
二、代码
1.初始化
tx.c
#include "tx.h"
void LED_Init(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = 0xff00;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIOD->ODR|=(1<<2);
GPIOC->ODR|=0xff00;
GPIOD->ODR&=~(1<<2);
}
void KEY_Init(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
u8 key_status[4]={
1,1,1,1};
void KEY_Driver(void){
u8 i;
static u8 backup[4]={
1,1,1,1};
for(i=0;i<4;i++){
if(backup[i]!=key_status[i]){
if(backup[i]!=0){
Key_action(i+1);
}
backup[i]=key_status[i];
}
}
}
void KEY_Scan(void){
u8 i;
static u8 key_buf[4]={
0xff,0xff,0xff,0xff};
key_buf[0]=(key_buf[0]<<1)|KEY1;
key_buf[1]=(key_buf[1]<<1)|KEY2;
key_buf[2]=(key_buf[2]<<1)|KEY3;
key_buf[3]=(key_buf[3]<<1)|KEY4;
for(i=0;i<4;i++){
if(key_buf[i]==0x00)
key_status[i]=0;
else if(key_buf[i]==0xff)
key_status[i]=1;
}
}
void Tim4_Init(u16 arr,u16 psc){
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr-1;
TIM_TimeBaseStructure.TIM_Prescaler = psc-1;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM4,TIM_IT_Update, ENABLE);
/* TIM2 enable counter */
TIM_Cmd(TIM4, ENABLE);
}
//PA6 PA7
u32 CH1_val;
u32 CH1_duty;
u32 CH2_val;
u32 CH2_duty;
void PWM_out(u32 fre1,u16 fre2,u8 en1,u8 en2){
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
CH1_val=1000000/fre1;
CH1_duty=CH1_val*50/100;
CH2_val=1000000/fre2;
CH2_duty=CH2_val*50/100;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2022
2022

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









