







YARN概念
Yet Another Resource Negotiator(好吧,另一种资源协调者),作业调度和集群资源管理的框架
HDFS&YARN进程通讯模型
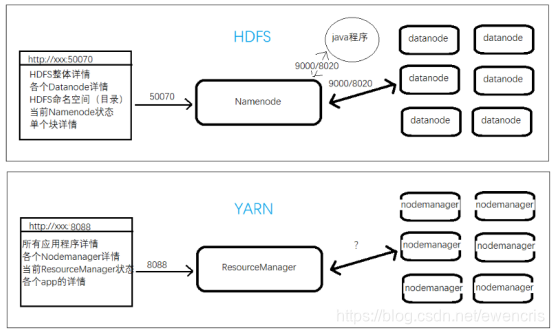
YARN程序执行流程
ResourceManager有两个主要组件:Scheduler和ApplicationsManager。
调度程序负责根据熟悉的容量,队列等约束将资源分配给各种正在运行的应用程序。调度程序是纯调度程序,因为它不执行应用程序状态的监视或跟踪。此外,由于应用程序故障或硬件故障,它无法保证重启失败的任务。调度程序根据应用程序的资源需求执行其调度功能; 它是基于资源Container的抽象概念,它包含内存,cpu,磁盘,网络等元素。
ApplicationsManager负责接受作业提交,协商第一个容器以执行特定于应用程序的ApplicationMaster,并提供在失败时重新启动ApplicationMaster容器的服务。每个应用程序ApplicationMaster负责从Scheduler协商适当的资源容器,跟踪其状态并监视进度。
YARN执行流程
1)yarn并不清楚用户提交的程序的运行机制
2)yarn只提供运算资源的调度(用户程序向yarn申请资源,yarn就负责分配资源)
3)yarn中的主管角色叫ResourceManager
4)yarn中具体提供运算资源的角色叫NodeManager
5)这样一来,yarn其实就与运行的用户程序完全解耦,就意味着yarn上可以运行各种类型的分布式运算程序(mapreduce只是其中的一种),比如mapreduce、storm程序,spark程序……
6)所以,spark、storm等运算框架都可以整合在yarn上运行,只要他们各自的框架中有符合yarn规范的资源请求机制即可
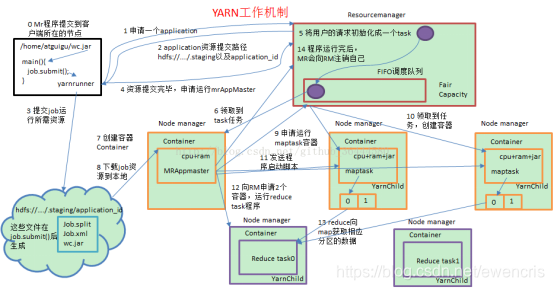
7)Yarn就成为一个通用的资源调度平台,从此,企业中以前存在的各种运算集群都可以整合在一个物理集群上,提高资源利用率,方便数据共享Yarn工作机制
(0)Mr程序提交到客户端所在的节点
(1)yarnrunner向Resourcemanager申请一个application。
(2)rm将该应用程序的资源路径返回给yarnrunner
(3)该程序将运行所需资源提交到HDFS上
(4)程序资源提交完毕后,申请运行mrAppMaster
(5)RM将用户的请求初始化成一个task
(6)其中一个NodeManager领取到task任务。
(7)该NodeManager创建容器Container,并产生MRAppmaster
(8)Container从HDFS上拷贝资源到本地
(9)MRAppmaster向RM 申请运行maptask容器
(10)RM将运行maptask任务分配给另外两个NodeManager,另两个NodeManager分别领取任务并创建容器。
(11)MR向两个接收到任务的NodeManager发送程序启动脚本,这两个NodeManager分别启动maptask,maptask对数据分区排序。
(12)MRAppmaster向RM申请2个容器,运行reduce task。
(13)reduce task向maptask获取相应分区的数据。
(14)程序运行完毕后,MR会向RM注销自己。
YARN调度模型
FIFO先进先出
Fair公平调度
容量调度

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









