




 该博客介绍了如何使用动态规划方法来解决一个数学问题:用n个21的小矩形无重叠地覆盖一个2*n的大矩形的不同方式数量。给出了当n等于1、2和4时的具体例子,并展示了一个动态规划实现的C++代码片段。动态规划算法通过维护前两个状态来计算当前状态的方法数,从而得出总的不同覆盖方式数。
该博客介绍了如何使用动态规划方法来解决一个数学问题:用n个21的小矩形无重叠地覆盖一个2*n的大矩形的不同方式数量。给出了当n等于1、2和4时的具体例子,并展示了一个动态规划实现的C++代码片段。动态规划算法通过维护前两个状态来计算当前状态的方法数,从而得出总的不同覆盖方式数。
描述
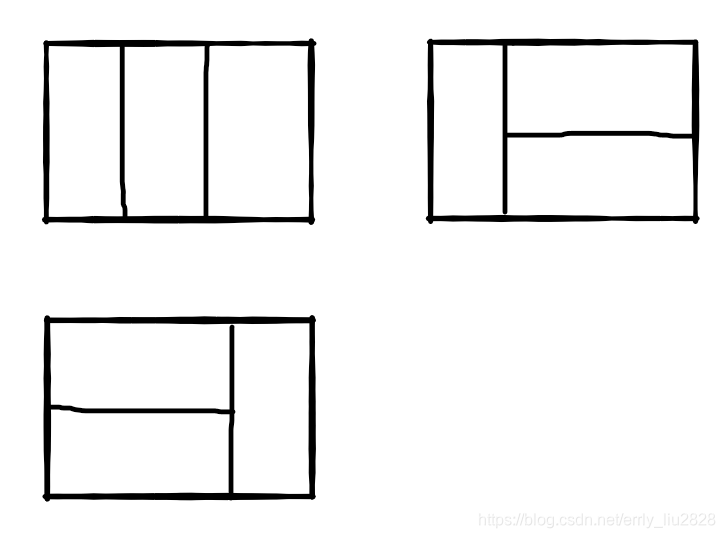
我们可以用21的小矩形横着或者竖着去覆盖更大的矩形。请问用n个21的小矩形无重叠地覆盖一个2*n的大矩形,从同一个方向看总共有多少种不同的方法?
比如n=3时,2*3的矩形块有3种不同的覆盖方法(从同一个方向看):
输入描述
2*1的小矩形的总个数n
返回值描述
覆盖一个2*n的大矩形总共有多少种不同的方法(从同一个方向看)
输入: 0
返回值: 0
输入: 1
返回值: 1
输入: 4
返回值: 5
class Solution {
public:
int rectCover(int number) {
if(number == 1 || number == 2)
return number;
int a = 1, b = 1, c;
for(int i = 2; i<= number; i++){
c = a+b;
a = b;
b = c;
}
return c;
}
};

















 3493
3493

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









