




 这篇博客介绍了如何使用疯壳提供的robotCtrl软件进行人形双足舞蹈机器人的PC上位机在线调试。通过调整界面中的舵机图标,设置B和P值来控制舵机角度,实现机器人的动作调试。此外,还讲解了动作管理、波特率设置、动作下载以及串口通信等基本操作,帮助用户进行离线运行和动作保存。
这篇博客介绍了如何使用疯壳提供的robotCtrl软件进行人形双足舞蹈机器人的PC上位机在线调试。通过调整界面中的舵机图标,设置B和P值来控制舵机角度,实现机器人的动作调试。此外,还讲解了动作管理、波特率设置、动作下载以及串口通信等基本操作,帮助用户进行离线运行和动作保存。
多自由度人形双足舞蹈机器人
——疯壳·机器人开发系列
PC 上位机在线调试
首先在我们提供的文件中找到上位机调试软件 robotCtrl,双击打开,界面如下。
图 1
界面中的舵机图标如同一个人形,人形中的每一个舵机与我们机器人身上的舵机一一对应。
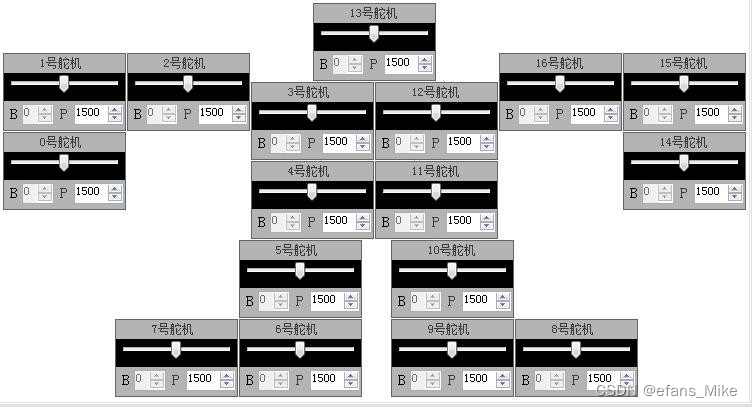
图 2
每一个舵机控制窗口之中有两个值:B、P。进度条 P 可以随意拖动,P 表示舵机位置(默认为中位 1500)范围为 500-2500,B 表示舵机偏差(默认为 0),即舵机的相对位置,范围为-100~ +100,导入动作组中的是绝对位置 P0=B+P。

图 3 &nbs
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









