



全膝设计中解剖稳定机制的复制与替代
摘要
背景 尽管目前使用的大多数全膝关节假体属于保留交叉韧带(CR)型和替代交叉韧带(PS) 型,但在满意度、功能和生物力学参数方面结果并不理想。有观点认为,一种能够专门替 代提供稳定性的结构的设计,可能产生正常的松弛度行为,这或许是改善临床效果的一个 发展方向。
方法 在低轴向载荷和高轴向载荷条件下,确定了解剖膝的稳定结构。内侧胫骨平台前部的上斜 坡和前交叉韧带在所有载荷条件下均尤为重要。基于这些数据制定了一种导向运动设计, 并在模拟机器上进行了测试,该机器执行了增强的ASTM约束试验以确定其稳定性与松弛 度。
结果 与后稳定型设计相比,导向运动设计在前后方向和内外旋转方面的中性运动路径和松弛度 更接近正常。具体特点包括早期屈曲时无矛盾性前移,以及在较大屈曲角度时出现外侧后 滚。
结论 一种复制了解剖型膝关节稳定结构的全膝关节设计,可能提供更符合解剖学运动的特点, 并可能改善临床结果。
引言
目前使用的大多数全膝关节假体属于两种类型:一种是保留后交叉韧带且胫骨承重面 相对较浅的设计(CR型),另一种是采用髁间凸轮‐柱机制替代十字韧带功能、且承重面 相对更匹配的设计(PS型)。尽管这些设计总体上取得了成功[1], ,但仍存在患者满意度 不高的情况[2] ,而生物力学研究揭示了一些缺陷,如矛盾性前后位移[3,4]、异常步态模 式[4‐6],以及咔嗒声等声响[7,8]。在双侧对比研究中,患者相较于CR型和PS型更偏好内 侧枢轴型和双交叉韧带保留型假体,其原因被认为是增强了前后稳定性[9]。同样的结论 也适用于单髁膝关节,基于被遗忘的关节评分显示,恢复正常的髁部解剖结构以及保留十 字韧带被认为是主要因素[10]。因此,有理由认为,在可能的情况下,仅替换承重面是一 种优势;然而,当需要或倾向于切除十字韧带时,则承重面必须复制关节所有结构的稳定 功能。另一个要求是,其约束特性应接近正常解剖膝关节。尽管已有多种非十字韧带保留 型设计被报道,但结构最简单的主要是内侧枢轴型[11]和超高匹配度型[12]。前者具有完 全匹配的内侧和外侧低匹配性,而后者在内外两侧均具有中高匹配性。
本研究的目的是设计并评估一种在保留外侧和内侧表面适当匹配度的同时切除十字韧 带的全膝关节,以专门复制
正常膝关节结构的功能。然而,由于在不同屈曲角度下对松弛度与稳定性存在相互冲突的 要求,仅通过两个承重面来实现十字韧带的功能可能是不可能的。因此,本研究的假设是: 只有在外侧和内侧轴承之间引入第三个轴承,才能实现正常的稳定性和松弛度特性。第一 步是根据以往对解剖膝的研究确定主要的稳定结构。这为十字韧带替代型全膝关节复制解 剖型稳定性与松弛度提供了依据。该设计在试验机上进行评估,试验机采用了标准约束试 验的增强版本。
方法与材料
导向运动膝关节设计的解剖学基础
查阅了解剖膝关节的稳定机制及相关稳定结构的文献。对膝关节标本[13‐16], 或人体受 试者[17,18],的膝关节施加不同轴向压缩载荷的前后方向力或内外侧扭矩,并测量其位移。
在无轴向载荷时,十字韧带提供前后稳定性,侧副韧带提供内翻‐外翻稳定性,而前交叉 韧带和内侧副韧带共同提供旋转稳定性。内侧半月板限制股骨相对于胫骨的后移。在高屈 曲状态下,后交叉韧带引起股骨后移,主要发生在外侧,这是由于外侧胫骨平台存在向下 斜坡[19]所致。然而,当存在轴向压缩力时,松弛度显著降低,尤其是前后方向位移,这 可归因于内侧股骨和胫骨关节面之间部分的匹配性。然而,对股骨的限制作用则大为增强
与后方相比,在胫骨上向前移位。这被证明与内侧胫骨平台后半部几乎水平的斜面以及前 半部向上倾斜的解剖特征相对应[20‐22] ,该特征已在解剖学上有所描述[23]。股骨后移 仍由前交叉韧带[22]限制。
导向运动膝关节设计
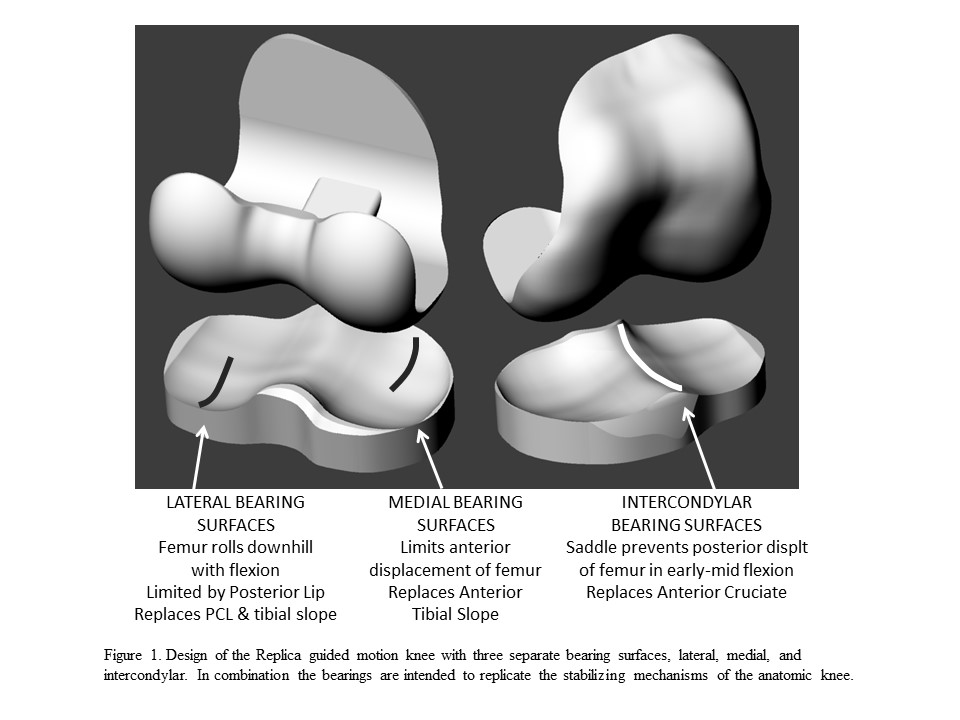
基于上述数据,设计了一种新的导向运动膝关节(图1)。内侧胫骨表面的前斜面及其在 股骨部件远端前表面的对应区域均有所增加,以复制解剖膝关节中胫骨前部斜面的功能。
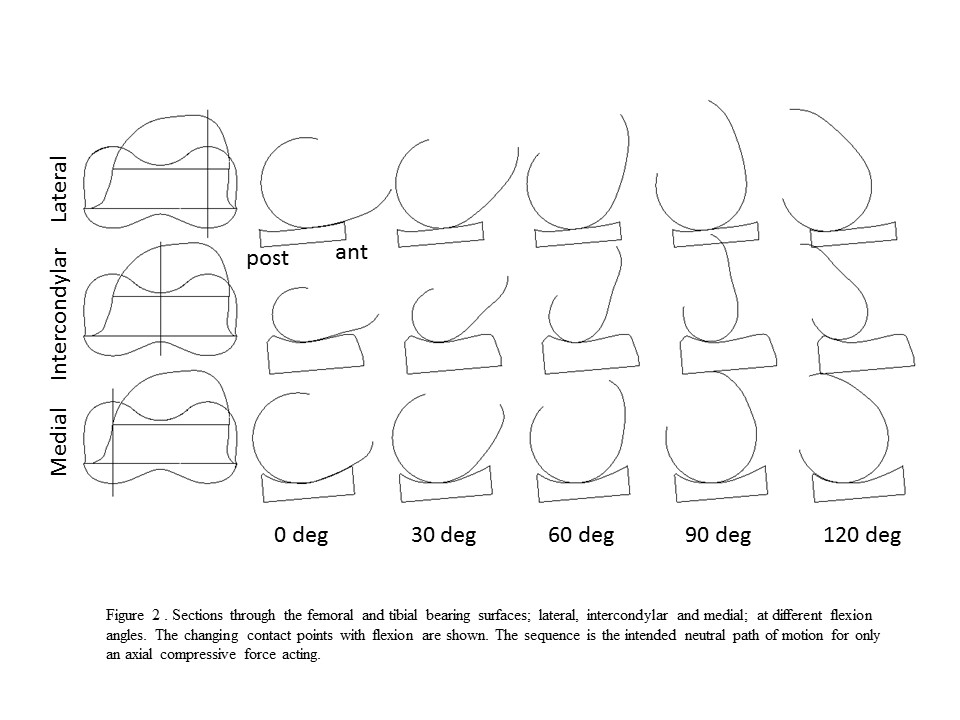
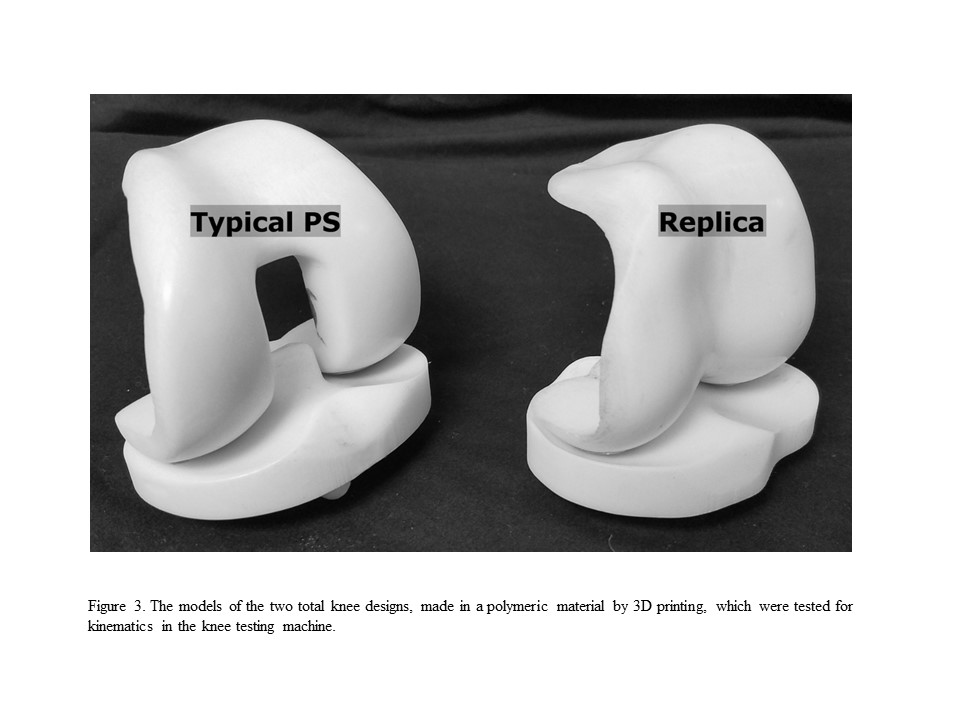
在髁间区,采用鞍形轴承[24] ,在屈曲达60度时限制股骨后移,随后在屈曲至120度的 过程中逐步允许最大4毫米的后移,该轴承复制了前交叉韧带的功能。胫骨部件承重面的 精确轮廓是基于先前方法[25]形成的。起始设计为一个在矢状面和冠状面上从远端到后方 承重面半径均为23毫米、内外侧轴承间距为48毫米的股骨部件。将该股骨部件置于平均 解剖屈曲运动路径的渐进位置,并结合正常膝关节的松弛位置,对股骨组合体远端覆盖表 面并进行平滑处理。图2显示了通过外侧和内侧髁的截面,可见股骨外侧髁的渐进后滚以 及股骨内侧髁的相对固定。该导向运动膝关节以及一种现代代表性PS型均采用Mojo桌面 3D打印机(Stratasys公司,美国明尼苏达州伊甸草原)通过ABS塑料3D打印制造而成, 并对承重面进行抛光以尽量减少摩擦(图3)。
运动学测试
通过3D打印平均男性远端股骨和近端胫骨[26]来制作合成骨骼。将导向运动模型和后 稳定型(PS)模型安装到这些3D打印的骨骼上。胫骨部件置于中立轴向旋转位,并具有 5度后倾角。股骨部件的放置方式使其后方和远端股骨髁与平均股骨模型的髁位置一致。
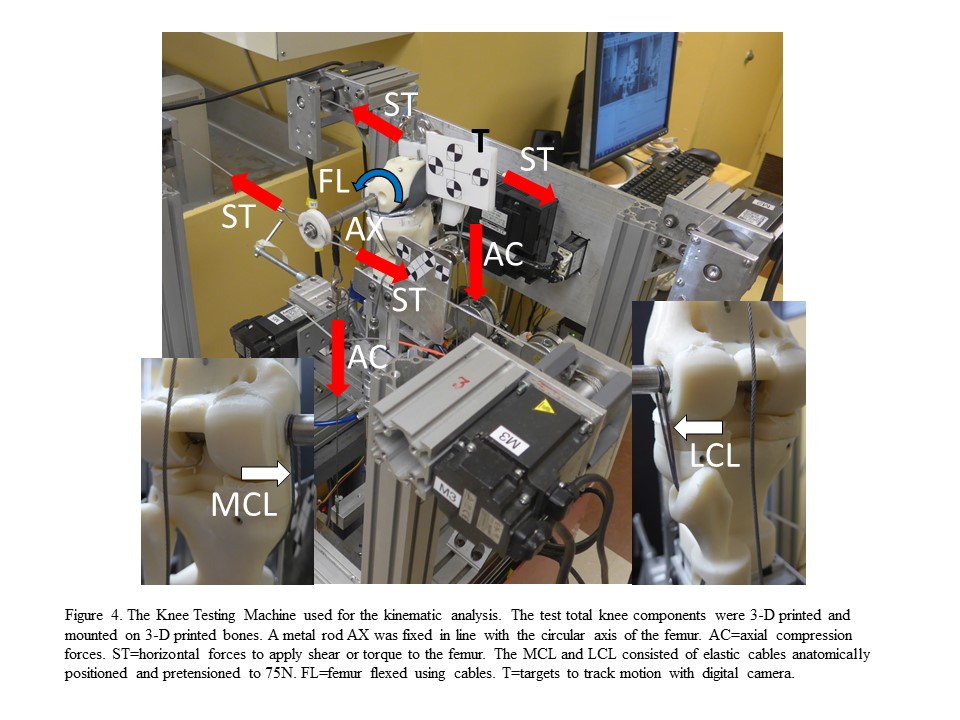
解剖型胫骨及其组件被刚性固定在六自由度膝关节测试机 27 中。解剖型股骨 及其组件包含一根金属杆,该金属杆穿过植入物的圆形轴,且与通过股骨髁后方的弧形中 心同轴。在植入物的关节面上涂抹氟醚润滑剂(Krytox,杜邦,美国特拉华州威尔明顿), 其摩擦系数为0.06,与金属对聚乙烯的摩擦系数相似。试验机底部的气动缸通过垂直缆线 连接到股骨杆两侧,向股骨施加轴向压缩力。试验机四个角上的四个伺服电机通过水平缆 线连接至股骨杆,向股骨施加剪切力和扭矩力。位于胫骨内侧和外侧的两个气动缸用于向 两条弹性带施加75 N的预张力,这些弹性带在膝关节0度屈曲时作为侧副韧带替代物。这 些数值基于全膝关节手术期间胫骨表面典型的接触力[28,29]。模拟侧副韧带的刚度为50 N/mm,与实测值相似[30]。侧副韧带的附着点位于股骨的圆形轴上,并根据尸体测量数 据在胫骨上进行解剖学定位[31]。位于胫骨前方和后方的两个伺服电机通过缆线连接至股 骨近端,实现膝关节从0°到135°的动态屈曲。光学运动追踪系统
(MicronTracker Sx60,克拉伦技术公司,多伦多,安大略省,加拿大)记录了附着在 股骨和胫骨上的黑白标记点在空间中的位置。
在以下加载条件下对设计进行了测试:1)500 N 压缩,2)500 N 压缩加 100 N 前 向剪切,3)500 N 压缩加 100 N 后向剪切,4)500 N 压缩加 2.5 Nm 内扭矩,以及 5) 500 N 压缩加 2.5 Nm 外扭矩。压缩与剪切、压缩与扭矩的比值基于带传感器的全膝关节 的数据[32, 33]。每种加载条件下进行三次测试,并获得平均运动学数据。该测试基于美 国材料与试验协会(ASTM)测量全膝关节约束性的标准[34]。
数据处理与评估
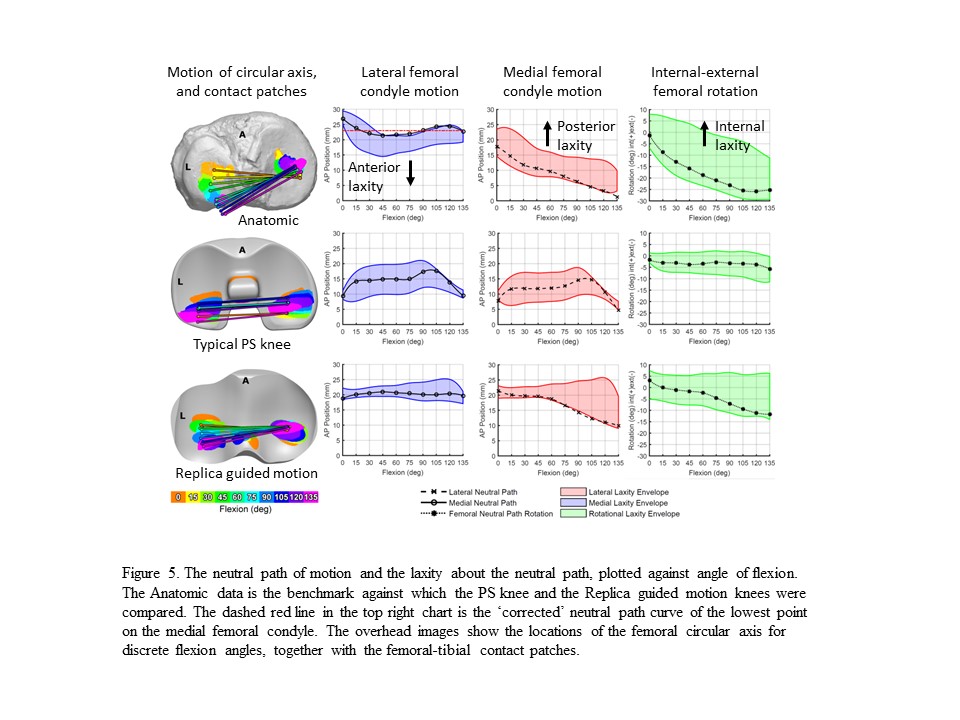
一个自定义的Matlab程序利用光学跟踪器的输出数据,计算股骨圆形轴的外侧和内 侧点相对于投影到横断面上的胫骨后髁连线的前后(AP)位置。这些点位于距股骨中心 ±24mm处。中性运动路径定义为仅压缩载荷条件下屈曲时圆形轴的位置。松弛包络定义 为施加前向和后向剪切力时AP位置的变化。旋转松弛度定义为施加内、外扭矩时相对于 中性位置的轴向旋转变化。使用Geomagic Verify(3D系统公司,罗克希尔,南卡罗来 纳州,美国)在胫骨表面描绘接触区域。
两种设计的运动学特性与平均解剖膝[27]的基准进行了比较。股骨内侧髁中性路径的 定义根据该参考文献进行了修改。解剖膝的圆形轴基于后方
髁的一部分,而内侧的远端区域在早期屈曲时发生关节运动,其半径较大[19]。为了校正 这一点,我们绘制了股骨髁上的平均最低点,结果得到股骨内侧髁与胫骨后部之间的距离 接近恒定,为23毫米。
结果
图5显示了运动数据的曲线图。对于解剖膝,内侧髁最低点几乎保持恒定,平均位于 胫骨后方23mm处。松弛度主要表现为后方松弛,平均为6mm。股骨外侧髁在屈曲过程 中向后移动16mm;其松弛度为前方8mm,而后方仅为0‐3mm。随着屈曲进行,股骨出 现渐进性外旋,内侧松弛为15°,外侧为5°。接触区域显示后方存在外侧半脱位,而内侧 接触则几乎保持不变。
后稳定型(PS)表现出相等的外侧和内侧运动,与解剖型不同。中性轨迹曲线的形 状明显不同于解剖型。在中性轨迹周围的松弛度相等,而不是像解剖型那样存在偏向性。
在高屈曲和低屈曲时松弛度减小,表明存在限制作用。
导向运动膝关节与解剖型膝关节具有相对接近的对应性。中立路径相似,相对于中立 路径的松弛度也相似。主要差异在于,早期屈曲时外侧松弛度低于解剖型,而在高屈曲时 则高于解剖型。
讨论
设计了一种导向运动全膝关节,其中特定解剖结构的稳定性功能被三个独立的轴承所 替代。在内侧,陡峭的股骨远端前表面复制了胫骨前部的上斜坡,限制了股骨前移[22]; 股骨后移也由内侧胫骨承重面加以限制。在髁间区,一个鞍形轴承替代前交叉韧带的作用, 通过屈曲过程中控制股骨后移,尤其是在屈曲范围的前半段发挥作用。在外侧,胫骨表面 的下斜坡复制了解剖外侧胫骨平台的斜度以及后交叉韧带的功能,但过度的后滚则由后唇 加以限制。该设计具有避免使用凸轮柱、胫骨上采用融合承重面、连续的髌骨滑车无中央 分隔以及避免股骨中央骨切除的优点。
我们的假设得到了支持,即导向运动膝关节与解剖型膝关节的稳定性与松弛度具有相 似性,而与标准后稳定型膝关节存在显著差异。尽管我们的数据并未严格证明复制解剖型 稳定性方法能够比其他设计方法在体内产生更接近解剖型的运动学特性,但它代表了一种 系统化方法,认识到必须考虑所有解剖结构所提供的稳定性的重要性。
已有许多其他尝试设计能够产生更符合解剖运动学的全膝关节假体。其中最早偏离传 统对称外侧和内侧髁的设计概念之一是内枢轴膝关节[35]。在各种活动的透视评估中, 内侧枢轴膝关节显示出较小的内侧前后位移。临床上,这种类型的膝关节假体效果等于或 优于标准的保留后交叉韧带型(CR)和后稳定型(PS)[36]。其局限性在于缺乏内侧松 弛度,且没有控制外侧的机制
位移。超高匹配度膝关节并非在所有方面都优于后稳定型(PS)[37,38] ,尽管具有更多 内侧匹配和更少外侧匹配的设计具有临床优势[39]。双表面膝关节采用浅球窝结构以提供 稳定性,此处位于组件中心[7]。该设计将这一额外表面视为第三髁,在屈曲后期提供稳 定性,这一点已通过透视研究得到证实。一旦球窝结构啮合,内外旋转便有了固定支点。
其他作者采用了直接的解剖学方法进行全膝关节设计,最早始于1972[40]。最近, 有研究使用计算机模型评估了各种结构的相对作用,包括交叉韧带、凸面外侧胫骨表面, 甚至半月板附着点的作用[41‐43]。其他作者将外侧胫骨平台的凸面矢状轮廓纳入全膝关 节设计中[44]。通过计算机模型,这些作者发现股骨外侧髁在屈曲过程中向后移动,并在 保留后交叉韧带的辅助下实现高屈曲。类似地,研究发现体内凸面外侧平台可产生外侧后 滚,从而降低髌骨受力[45]。
对于仿生膝关节,采用平均股骨形态沿解剖运动路径移动以切削出胫骨表面[46,47]。
通过包含所有自由度的多种运动,所得到的胫骨表面在外侧呈凸面,在内侧呈适度凹面。
设计强调与软组织的相容性,这一点至关重要,因为其设计旨在保留单侧或双侧交叉韧带。
在本研究中,我们再次采用解剖运动作为基准,但选择聚焦于中性运动路径以及中性路径 周围的松弛度,以代表一系列活动,涵盖膝关节的完整运动包络。
我们的研究存在一些局限性。导向运动设计是通过设计软件(犀牛(Rhinoceros), 麦克尼尔,华盛顿州西雅图,美国)中的图形工具进行迭代并结合多次物理测试后的修改 而形成的,并未采用诸如优化之类的正式设计方法。后稳定型设计也未必是一个经过优化 的设计。在运动学评估方面,若采用计算机模拟,将能更全面地比较两种设计之间的差异 [48] ,以及软组织状态(包括副韧带和宿主骨几何结构)的影响[49]。体外测试不可避免 的局限性在于,无论是计算机模拟还是物理评估,都无法确切预测体内性能。然而,与已 有大量体内数据的设计(如后稳定型(PS))进行体外对比,可以为测试方法的有效性 以及新设计的相对性能提供一定的参考信息。
如引言所述,全膝关节置换术的功能结果尚未达到正常水平。功能改善的可能性包 括全膝关节设计、手术技术和康复程序。对改善这些因素的可能方法进行研究至关重要。
因此,通过改进全膝关节设计来恢复正常膝关节力学,是可能提高患者功能结果的一个 重要研究领域。

















 2877
2877

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









