




损失函数(Loss Function)是机器学习、深度学习模型训练的核心优化目标,其核心作用是量化模型预测结果与真实标签之间的 “误差大小”,为模型参数调整提供明确的 “方向指引”—— 模型通过最小化损失函数的值,逐步优化参数,最终提升预测精度。
在ultralytic系列中的yolo损失函数存在于ultralytics\utils\loss.py的目录下: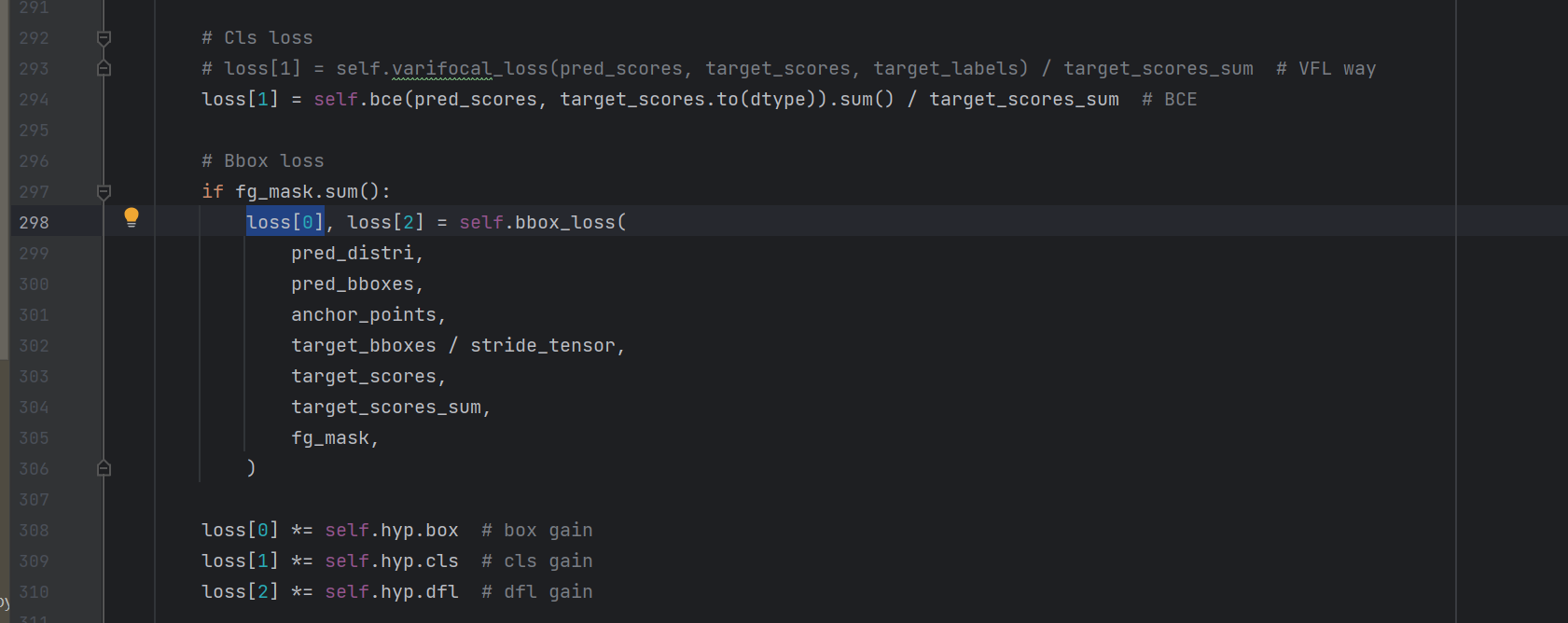
从这段代码可以看出,关于yolo的损失函数存在3种
box gain(边界框损失权重)
对应损失:box gain(self.hyp.box)对应的是边界框回归损失,用于衡量预测的目标边界框(Bounding Box)与真实边界框之间的差异。常见的边界框回归损失函数有均方误差(MSE)、交并比损失(IoU Loss)及其变体(如 GIoU Loss、DIoU Loss、CIoU Loss 等)。
作用:通过乘以这个权重系数,可以调整边界框损失在总损失中所占的比重。如果该值设置得较大,意味着模型在训练过程中会更加注重边界框预测的准确性,即更努力地让预测框去接近真实框;如果设置得较小,那么边界框预测的准确性对总损失的影响就会相对减弱,模型可能会更侧重于优化其他类型的损失。
cls gain(类别损失权重)
对应损失:cls gain(self.hyp.cls)对应的是类别预测损失,用于衡量模型预测的目标类别与真实类别的差异。在目标检测中,通常采用交叉熵损失(Cross Entropy Loss)来计算类别损失。对于多类别分类问题,会使用多类别交叉熵损失 ,对于二分类问题,则使用二分类交叉熵损失。
作用:这个权重系数决定了类别预测损失在总损失中的重要程度。当该权重较大时,模型会更关注准确地预测目标的类别,即使边界框的预测效果稍差,只要类别预测准确,也能在一定程度上减小总损失;若权重较小,模型在类别预测上的关注度会相对降低,可能会更倾向于优化边界框损失等其他损失项。
dfl gain(分布 focal loss 权重)
对应损失:dfl gain(self.hyp.dfl)对应的是分布 focal loss(DFL),这是一种用于改进边界框回归的损失函数,它将边界框回归视为一种分布估计问题。传统的边界框回归是直接预测边界框的坐标值,而 DFL 通过对边界框坐标的分布进行建模,使得模型能够更准确地预测边界框的位置。
作用:通过调整dfl gain 这个权重系数,可以控制分布 focal loss 在总损失中的贡献大小。当该权重较高时,模型会更注重基于分布估计的边界框回归优化,进一步提高边界框预测的精细度;如果权重较低,那么分布 focal loss 对模型训练的影响就会减弱。
ctrl+点击该区域的代码即可进行跳转到对应损失函数的源代码的位置。例如box gain。
其源代码的位置存在于ultralytics\utils\metrics.py
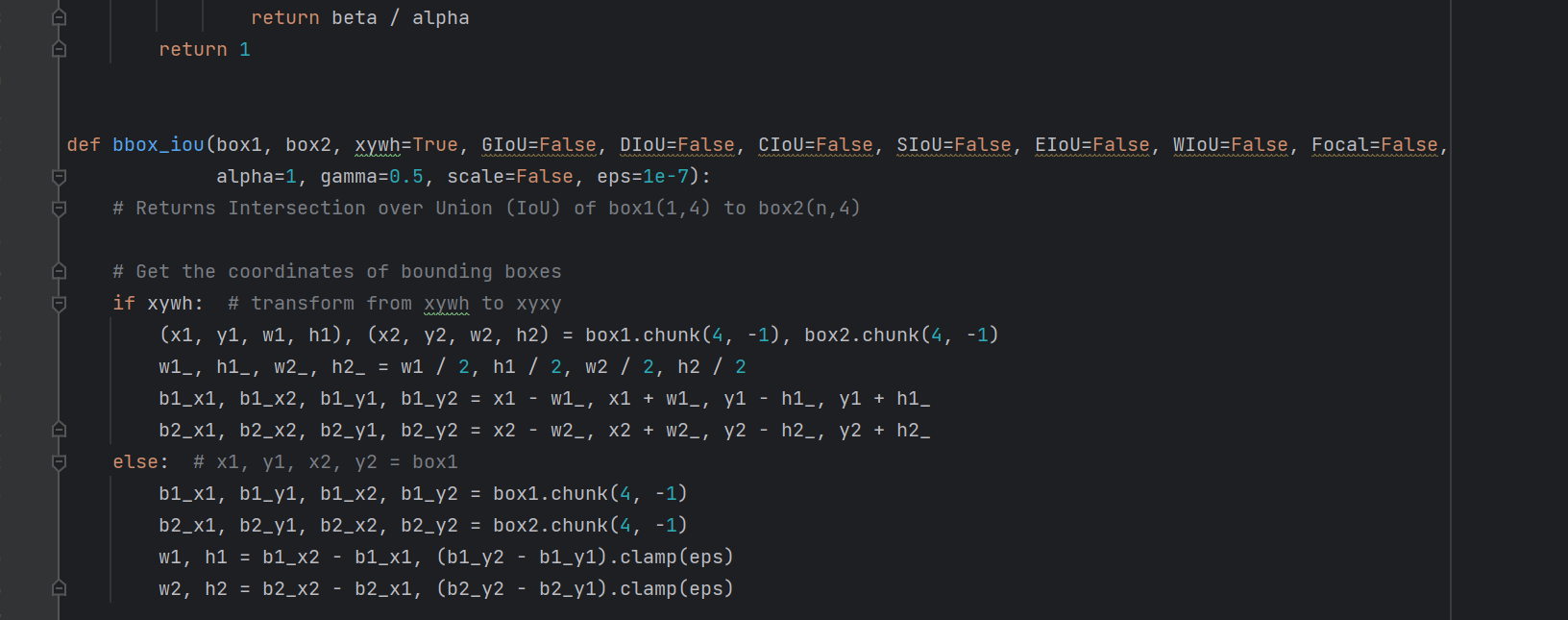
找到这里我们就可以对其原来的Ciou损失函数进行一个更改。
def _scaled_loss(cls, self, gamma=1.9, delta=3):
if isinstance(self.monotonous, bool):
if self.monotonous:
return (self.iou.detach() / self.iou_mean).sqrt()
else:
beta = self.iou.detach() / self.iou_mean
alpha = delta * torch.pow(gamma, beta - delta)
return beta / alpha
return 1
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, WIoU=False, Focal=False,
alpha=1, gamma=0.5, scale=False, eps=1e-7):
# Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \
(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
if scale:
self = WIoU_Scale(1 - (inter / union))
# IoU
# iou = inter / union # ori iou
iou = torch.pow(inter / (union + eps), alpha) # alpha iou
if CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squared
rho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (
b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha_ciou = v / (v - iou + (1 + eps))
if Focal:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter / (union + eps),
gamma) # Focal_CIoU
else:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
elif EIoU:
rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2
rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2
cw2 = torch.pow(cw ** 2 + eps, alpha)
ch2 = torch.pow(ch ** 2 + eps, alpha)
if Focal:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter / (union + eps),
gamma) # Focal_EIou
else:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIou
elif SIoU:
# SIoU Loss https://arxiv.org/pdf/2205.12740.pdf
s_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + eps
s_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + eps
sigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)
sin_alpha_1 = torch.abs(s_cw) / sigma
sin_alpha_2 = torch.abs(s_ch) / sigma
threshold = pow(2, 0.5) / 2
sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)
angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)
rho_x = (s_cw / cw) ** 2
rho_y = (s_ch / ch) ** 2
gamma = angle_cost - 2
distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)
omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)
omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)
shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)
if Focal:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(
inter / (union + eps), gamma) # Focal_SIou
else:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIou
elif WIoU:
if Focal:
raise RuntimeError("WIoU do not support Focal.")
elif scale:
return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp(
(rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051
else:
return iou, torch.exp((rho2 / c2)) # WIoU v1
if Focal:
return iou - rho2 / c2, torch.pow(inter / (union + eps), gamma) # Focal_DIoU
else:
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
if Focal:
return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter / (union + eps),
gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdf
else:
return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdf
if Focal:
return iou, torch.pow(inter / (union + eps), gamma) # Focal_IoU
else:
return iou
将原来的代码注释,替换为这段代码,同时点击loss.py文件,将原本的iou的位置改进,加入wiou的相应条件即可
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, WIoU=True, scale=True)
if type(iou) is tuple:
if len(iou) == 2:
loss_iou = ((1.0 - iou[0]) * iou[1].detach() * weight).sum() / target_scores_sum
else:
loss_iou = (iou[0] * iou[1] * weight).sum() / target_scores_sum
else:
loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum


















 4138
4138

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









