




 本文研究了使用gelspinning技术制造PVA聚乙烯醇复合纤维,通过dGO包覆ploy(dopamine)增强,并在外部涂覆rGO。讨论了在PVA基底和GO之间的ploy(dopamine)粘附力的传递机制,以及rGO层提供的额外抗拉强度。
本文研究了使用gelspinning技术制造PVA聚乙烯醇复合纤维,通过dGO包覆ploy(dopamine)增强,并在外部涂覆rGO。讨论了在PVA基底和GO之间的ploy(dopamine)粘附力的传递机制,以及rGO层提供的额外抗拉强度。
本论文主要看的应该是溶液的配置:
摘要:
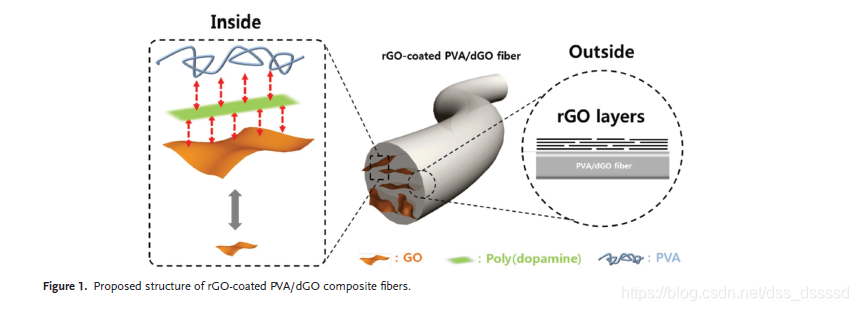
使用gel spinning 制造poly(vinyl alcohol)(PVA)聚乙烯醇复合纤维,并使用graphene oxide(dGO)包覆的ploy(dopamine)强化,外部在涂覆一层rGO(还原石墨烯)
在PVA基底和GO之间的ploy(dopamine)的粘附力能够通过强氢键高效传递。外部的rGO层可以通过rGO片材之间的界面剪切强度提供额外的抗拉强度
结构:
实验章节:
石墨烯(batcarbon 公司的 SP1型号)
浓硫酸(98% Merck)
KMnO4(99% sigma)
dopamine hydrochloride (98.5%, Sigma)
DMSO 二甲基亚砜 (99.9%, Acros
Organics)
https://baike.baidu.com/item/二甲基亚砜
PVA (Mw 89000–98000, 99% hydrolyzed, Aldrich)
尺寸控制的氧化石墨烯片材制备
- 将2.0g石墨烯粉末加入到浓硫酸中(46mL).
- 在搅拌和冷却下降6g KMnO4缓慢加入,在这个过程中温度维持在低于20摄氏度
- 混合物接下来在35摄氏度下搅拌2h,之后加入92mL的蒸馏水
- 15分钟之后,加入280mL的蒸馏水和30%的 H 2 O 2 H_2O_2 H2O2(5.0 mL)来终止反应。这之后颜色由黑色变为亮黄色
- 混合物在4000rpm下离心,使用1:10的HCL(500mL)清洗,去掉金属离子
- 氧化石墨烯悬浮在蒸馏水中,产生粘性的棕色分布,之后经过透析除去多余的金属离子和酸
- 为获得GO,氧化石墨烯使用ultrasonication (Sonic Dismembrator Model 500, Fisher Scientific)在100W下15min,之后再4000rpm下离心10min
- 使用不同功率50-350W超声处理获得不同的大小的GO
dGO制备
50ml的GO悬浮液(0.6mg/mL)使用NaOH溶液将pH调节到9左右。接下来加入0.3mL的dopamine hydrochloride aqueous solution (10 mg mL−1),混合物在室温下搅拌2h。最终溶液颜色变为黑色。

















 1159
1159

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









