




 本文详细解析卷积神经网络(CNN)中的strides(步长)和padding(填充),探讨如何使用padding避免边缘信息损失,以及在卷积操作中不同padding模式的影响。此外,介绍了多通道图像卷积和单层卷积的概念,结合实例阐述了卷积神经网络的基本构造。
本文详细解析卷积神经网络(CNN)中的strides(步长)和padding(填充),探讨如何使用padding避免边缘信息损失,以及在卷积操作中不同padding模式的影响。此外,介绍了多通道图像卷积和单层卷积的概念,结合实例阐述了卷积神经网络的基本构造。
惯例,还是分享一句歌词呢。
《诗话小镇》
岁月如流沙苍老了风华
那誓言未长大
流年斑驳眉心朱砂
你画上哪个她
繁华褪尽薄了红纱
约定符号:
- 输入图像: n×n n × n
- 过滤器: f×f f × f
- paddig(填充): p p
stride(步长):
padding
1. padding概念引入

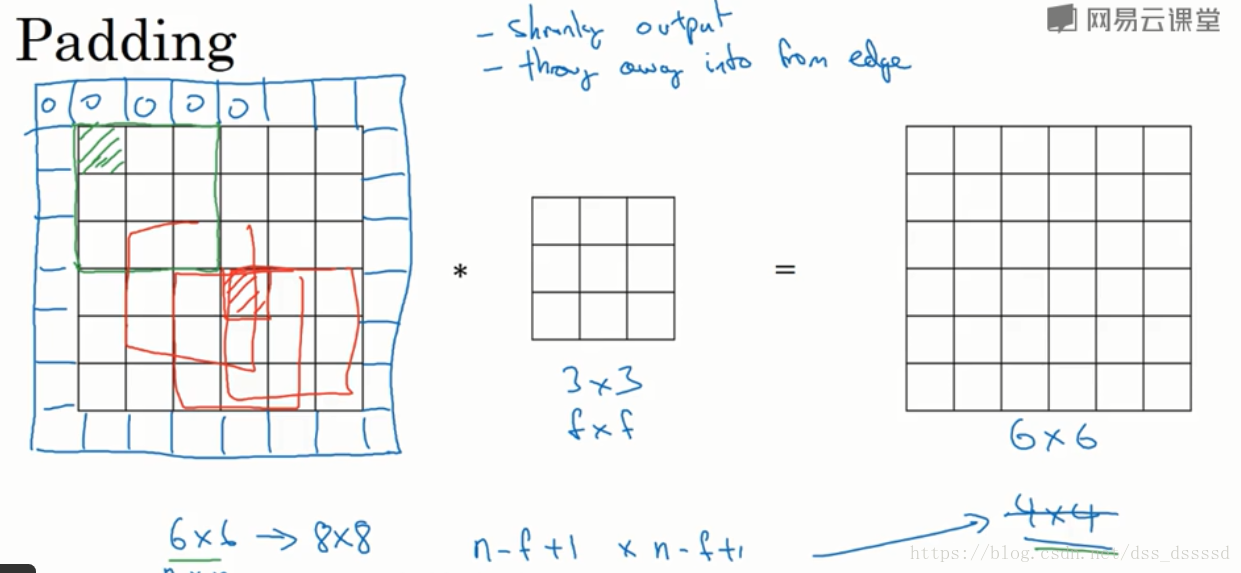
当使用一个
3×3
3
×
3
的过滤器对
6×6
6
×
6
的图像进行卷积操作后,会得到
4×4
4
×
4
的输出图像。
此时输出图像大小为:
但是这样会带来两个缺点:
- 图像会越来越小
- 如上图,原图像左上角绿色区域纸杯一个过滤器使用,而中间红色区域会被多个过滤器使用,这就意味着边缘信息的丢失
为此引入padding(填充)的操作,即在卷积操作之前,先在图像边缘进行像素填充,像素值可以是0也可以是图像边缘像素,填充宽度为p,例如在上图中使用像素0对图像边缘填充,宽度p=1,此时输出图像和输入图像维度相等,并且图像左上角的像素被多个过滤器使用,边缘信息丢失的更少。
此时,输出图像的维度为:
2. padding填充模式
padding=’VALID’
此时 p=0 p = 0 ,即不填充, 输出图像为 (n−f+1)×(n−f+1) ( n − f + 1 ) × ( n − f + 1 )
padding=’SAME’
此时输入和输出图像维度相同,此时:
p=f−12 p = f − 1 2
因为 n−f+2p+1=n n − f + 2 p + 1 = n注意: 一般 f f 为奇数,主要有两个好处:
- p可以取整数
- 奇数过滤器有一个中点,也称锚点(anchor),便于确认过滤器的位置
stride (卷积步长)

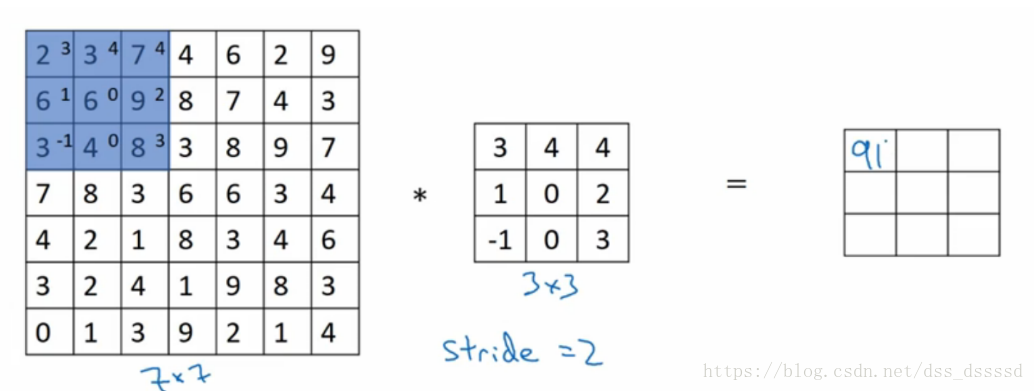
不同于之前一次想左移动一格,此时向左移动两格,

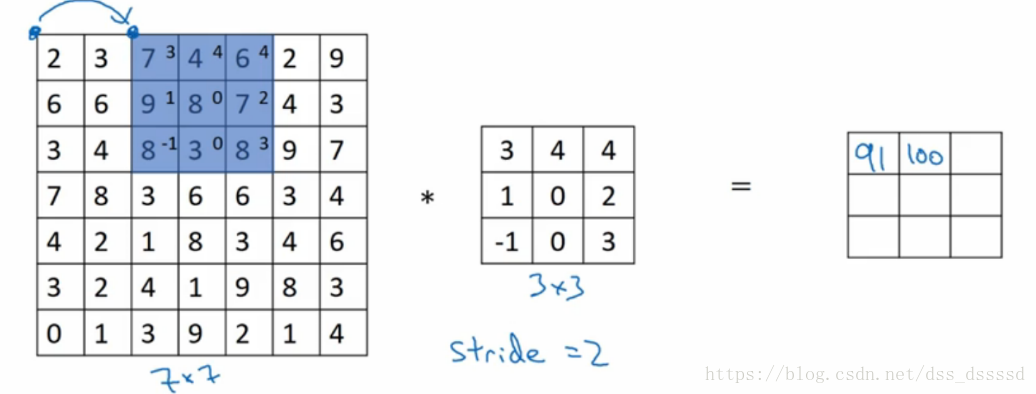
同样的,也是向下移动两格

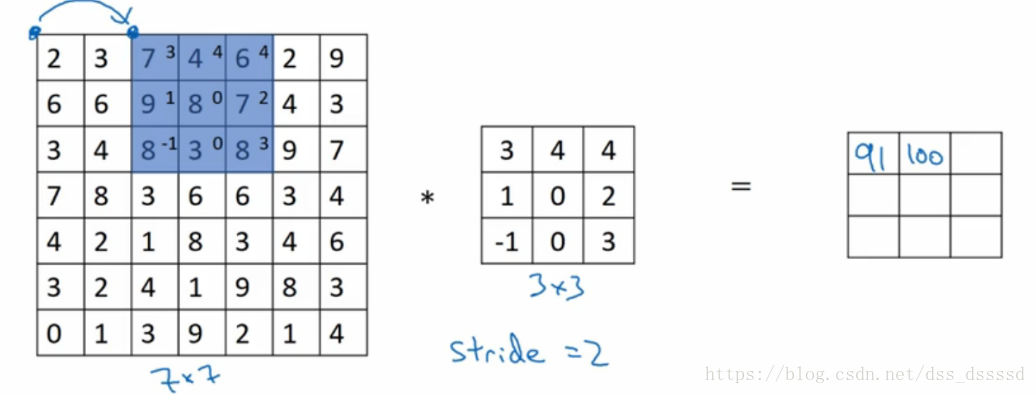
最终的输出图像大小为
假设stride移动步长为s,则最后的输出图像为:
其中, ⌊⌋ ⌊ ⌋ 为向下取整
比如上图中:
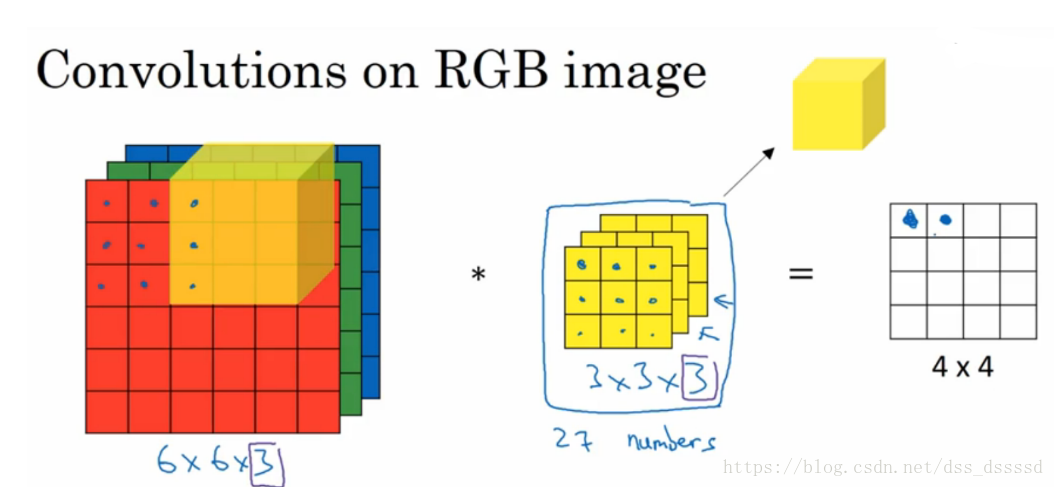
GRB多通道图像的卷积
比如在 6×6×3 6 × 6 × 3 ,过滤器的大小不在是 3×3 3 × 3 而是 3×3×3 3 × 3 × 3 ,最后的3对应为通道数(channels)。

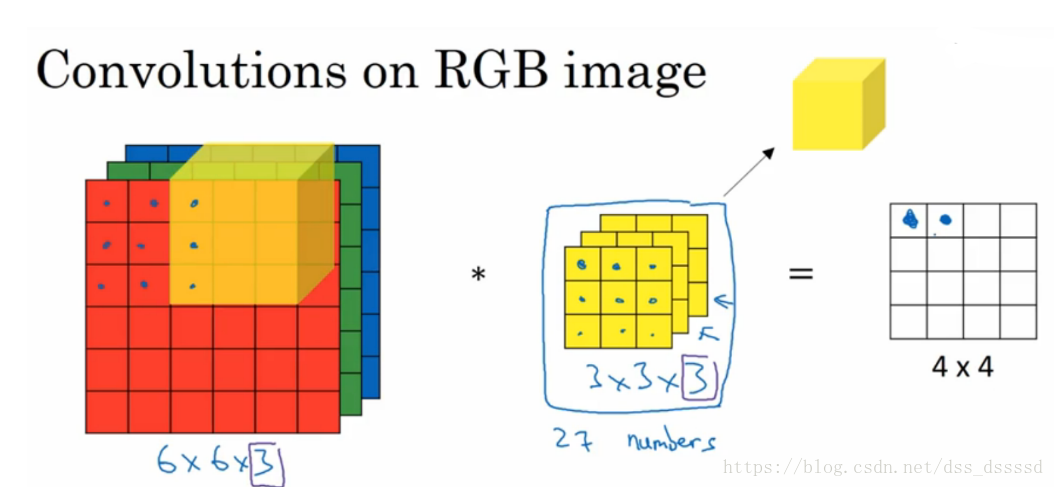
卷积过程:比如第一个 3×3 3 × 3 与R通道卷积,会得到一个数,同理,第二个 3×3 3 × 3 与G通道卷积,第三个 3×3 3 × 3 与B通道卷积,然后将三个数累加,作为 4×4 4 × 4 的左上角第一个位置值,接下来依次在图像上滑动,最终得到 4×4 4 × 4 的输出。
我们肯定不能只在图像中检测一种特征,而是同时要检测水平,垂直,45度边缘等特征,此时就要使用多个过滤器了。假设我们使用两个过滤器,最终的输出为 4×4×2 4 × 4 × 2 ,这里的2是使用两过滤器的结果,同样,若是使用5个过滤器呢?输出结果就是 4×4×5 4 × 4 × 5 了。下面是计算的例子:

单层卷积
上一节,得到两个
4×4
4
×
4
的矩阵,通过python的广播机制在两个矩阵上加入偏差bias,然后经过非线性函数relu,即可得到单层卷积网络的输出。
图示如下:

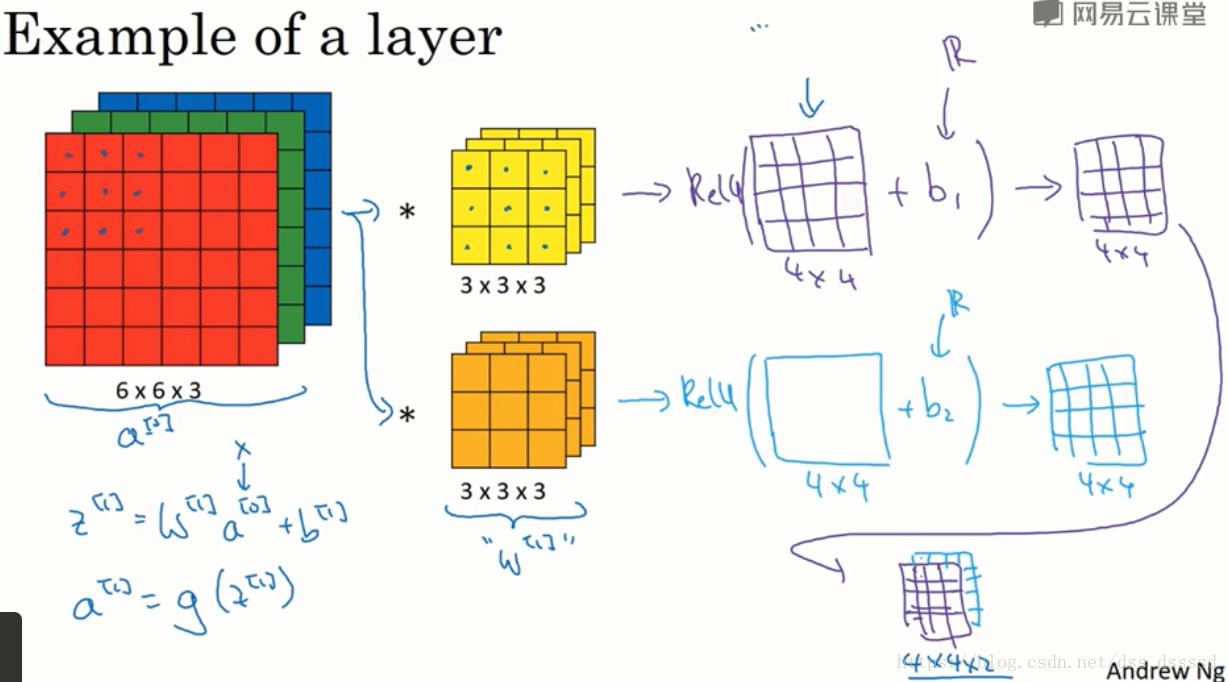
公示表示如下:
式子中 a[l] a [ l ] 标识第 l l 层的输出,标识第 l l 层的过滤器,标识第 l l 层的偏差
下面是动态计算的例子,跑的有点快,得计算一下,

比如:输出O[:,:,0]的左上角第一个值:
本系列课程的符号约束
过滤器需要四个参数确定:
宽度×高度×通道数×过滤器个数 宽 度 × 高 度 × 通 道 数 × 过 滤 器 个 数
其中,通道数与上一层图像输入的通道数相同,过滤器个数与本层输出图像的通道数相同。这一部分在下面的例子中会有深刻体现,并且在tensorflow函数调用中要明确指明的参数。符号约定
对于第 l l 层神经网络层:- :第 l l 层过滤器大小,
- p[l] p [ l ] :第 l l 层填充数量
- s[l] s [ l ] : 第 l l 层步长大小
nlC n C l : 过滤器的个数
input:
nl−1H×nl−1W×nl−1C n H l − 1 × n W l − 1 × n C l − 1 : l−1 l − 1 层输入图像的高宽以及通道数
output:
nlH×nlW×nlC n H l × n W l × n C l : 输出图像的高、宽以及通道数
- 输出图像的大小:
- nlH=⌊nl−1H+2×p[l]−f[l]s[l]+1⌋ n H l = ⌊ n H l − 1 + 2 × p [ l ] − f [ l ] s [ l ] + 1 ⌋
- nlW=⌊nl−1W+2×p[l]−f[l]s[l]+1⌋ n W l = ⌊ n W l − 1 + 2 × p [ l ] − f [ l ] s [ l ] + 1 ⌋
- 输出图像通道数就是过滤器个数: nlC n C l
将输出的图像加上Bias然后经过非线性函数Relu即可完成一层卷积神经网络的构建了。
简单卷积神经网络实例
建议在此部分自己找张纸推导一遍,我当时跟着课程推导了两三个网络实例。

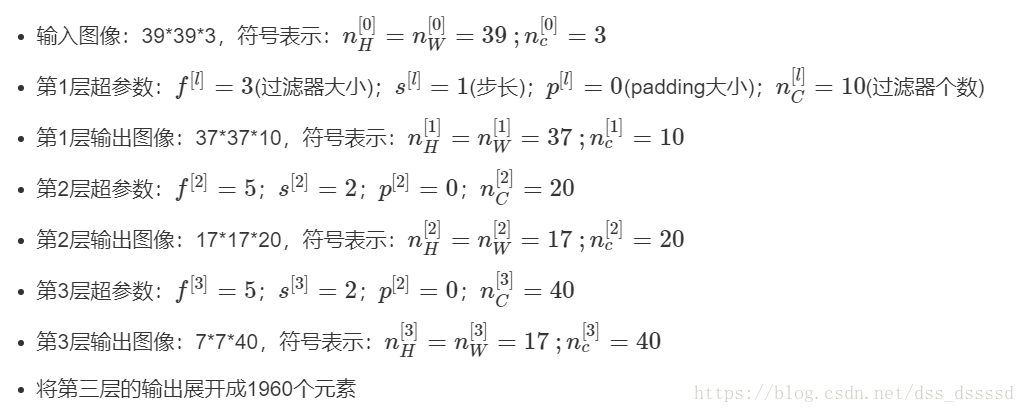
最后将第三层的输出通过softmax或logistic来进行相应的操作

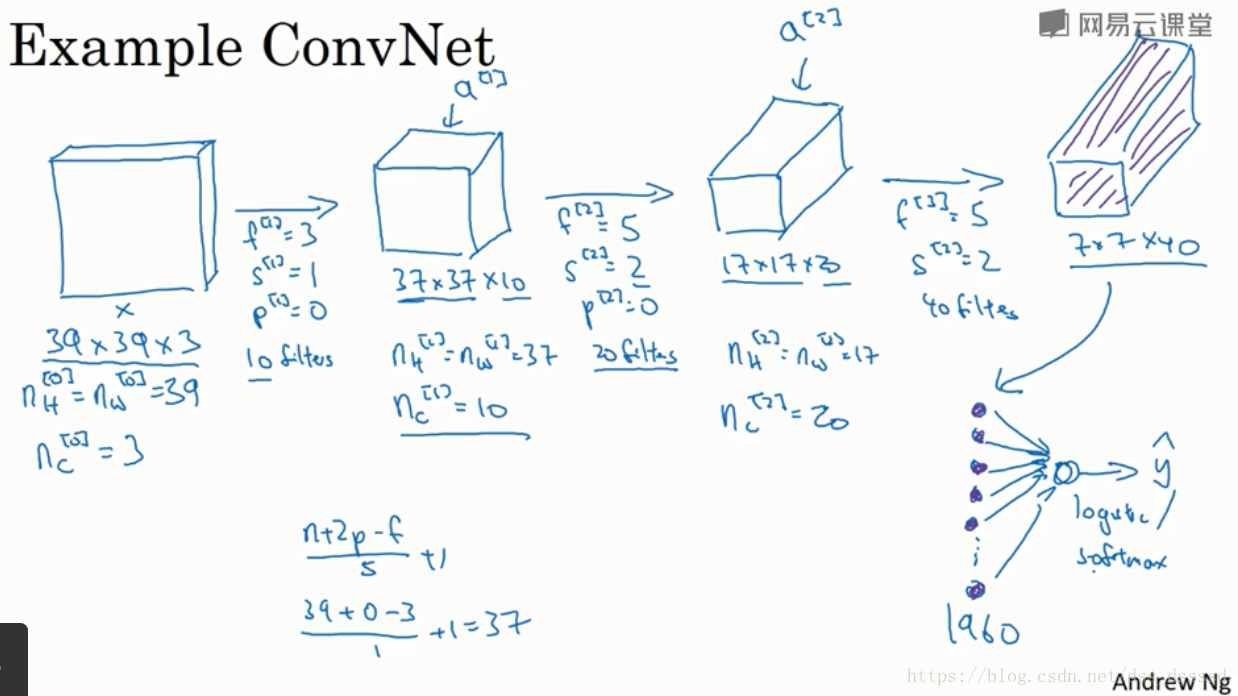
在这个网络结构中,有两个参数的变化值得注意:
- 图像宽度变化 39→37→17→7 39 → 37 → 17 → 7
- 图像通道数变化 3→10→20→40 3 → 10 → 20 → 40
图像宽度逐层减半而图像通道逐层增加,关于这些超参数的确定,后边会给出一些建议

















 906
906




 到【灌水乐园】发言
到【灌水乐园】发言







