



 该博客介绍了一个程序设计问题,涉及字符串处理。程序员阿伟希望提高工作效率,需要设计一个程序实现字符串的大小写转换及插入操作。程序需接收两个字符串A和B以及插入位置N,将字符串B的内容大小写互换后插入到字符串A的指定位置N。提供的代码示例展示了如何使用C语言来解决这个问题,包括读取字符串、大小写转换和字符串插入的步骤。
该博客介绍了一个程序设计问题,涉及字符串处理。程序员阿伟希望提高工作效率,需要设计一个程序实现字符串的大小写转换及插入操作。程序需接收两个字符串A和B以及插入位置N,将字符串B的内容大小写互换后插入到字符串A的指定位置N。提供的代码示例展示了如何使用C语言来解决这个问题,包括读取字符串、大小写转换和字符串插入的步骤。
题目:
描述
程序猿每天的工作经常需要用到Ctrl+C和Ctrl+V等快捷键以方便迅速的“借鉴”代码,但是阿伟觉得这样依然不够方便,希望你可以帮他设计一个程序快速的实现大小写转换和字符串的插入
阿伟会给出字符串A的内容字符串B的内容 以及 字符串B需要插入的位置N
你需要先将字符串B的内容进行大小写的转换(大写转小写,小写转大写)
然后在字符串A的第N个字符之后插入字符串B的内容
输入
共三行
第一行,输入字符串A的内容
第二行,输入字符串B的内容
第三行,包含一个正整数,表示字符串B需要插入的位置N
输出
共一行,输出处理完成后的字符串
输入样例 1
#include<.h> STDIO 9
输出样例 1
#include<stdio.h>
提示
测试数据字符串的长度不超过10^3
代码
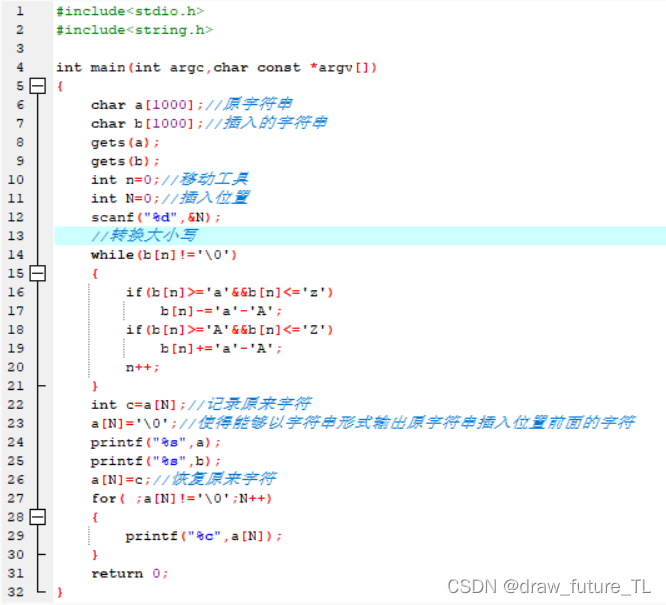
分析:
一、根据题目可知,需要读取两个字符串,于是便采用了gets函数来进行读入(能使得空格之类的符号读入):
二、做完读入工作后,便是根据题目将字符串B的大小写进行转换,如下图:
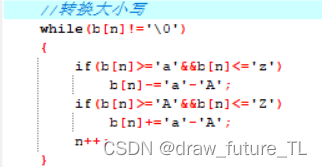
其中由于字符串最后一个是'\0',因此以不等于'\0'作为循环条件(函数在读取结束编译器会自动填入一个0值表示结束)
三、接下来是输出工作:
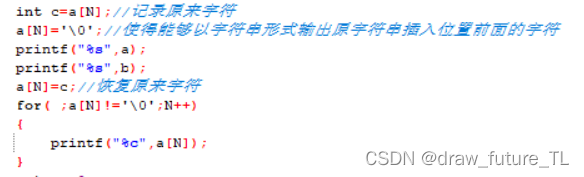
这里利用%s读取到'\0' 结束的特性,直接将插入位置改为'\0',使得能直接输出原字符串插入位置前面的字符。
然后输出插入字符串,最后将更改的字符填回去,利用循环将剩余字符输出(条件原因与转换大小写的原因相同)

















 16万+
16万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









