



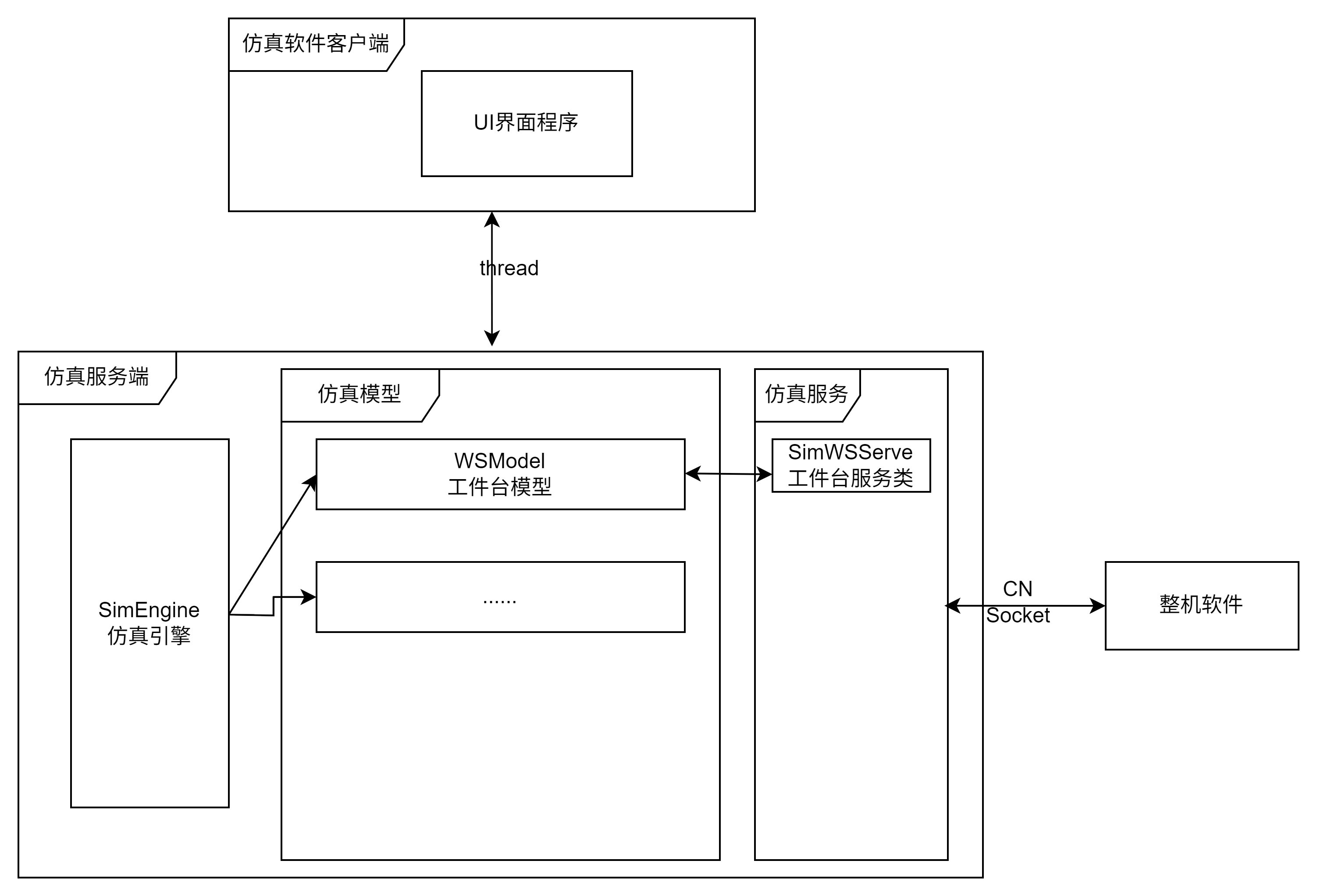
一.总体架构图
二.Tips
1.仿真引擎中包含定时器,以一定的频率去驱动仿真模型发生动态变化。
2.仿真模型中包含模拟的量化数据 和 模型的状态。
3.仿真服务接收到Socket请求,只与仿真模型交互,只会去改变仿真模型的状态,或者获取仿真模型里的数据。
三、示例
1.仿真软件初始化时,设置了WSModel中的运动参数,比如速度,加速度,加加速度等。
2.SimWSServe接收到ws_move的请求后,改变WSModel的运动状态为moving,设置WSModel的运动终点。
3.SimEngine以t毫秒一次的频率去驱动WSModel。当WSModel的运动状态为moving时,SimEngine改变WSModel的currentPos数据为currentPos + v * t。直到currentPos达到运动终点时,将WSModel的运动状态重新变为idle。
4.SimWSServe接收到ws_pos_get请求后,直接获取WSModel的currentPos数据,此时位置数据不一定就是终点位置,可能在一个t ms的时候发生改变。

















 3535
3535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









