






文章目录
以下是针对 Halcon 模板匹配八种方法的详细说明,包括算法原理、应用场景、优缺点及示例代码。Halcon 的模板匹配方法实际上分为不同类别,部分方法可能属于同一技术分支的不同配置。以下内容基于 Halcon 官方文档和实践经验整理:
1. 灰度值匹配(Gray-Value-Based Matching)
- 算法原理
直接比较模板与图像的像素灰度值,使用**平方差和(SSD)或绝对差和(SAD)**作为相似度指标。 - 应用场景
光照稳定、背景简单且目标与背景灰度差异明显的场景(如工业零件定位)。 - 优点
- 计算速度快;
- 实现简单。
- 缺点
- 对光照变化敏感;
- 无法处理旋转、缩放或遮挡。
- Halcon 代码示例:
// 创建模板 create_template(TemplateImage, 5, 'sort', 'original', &TemplateID); // 匹配 best_match(TemplateID, SearchImage, 0.8, 'false', 1, &Row, &Column, &Error);
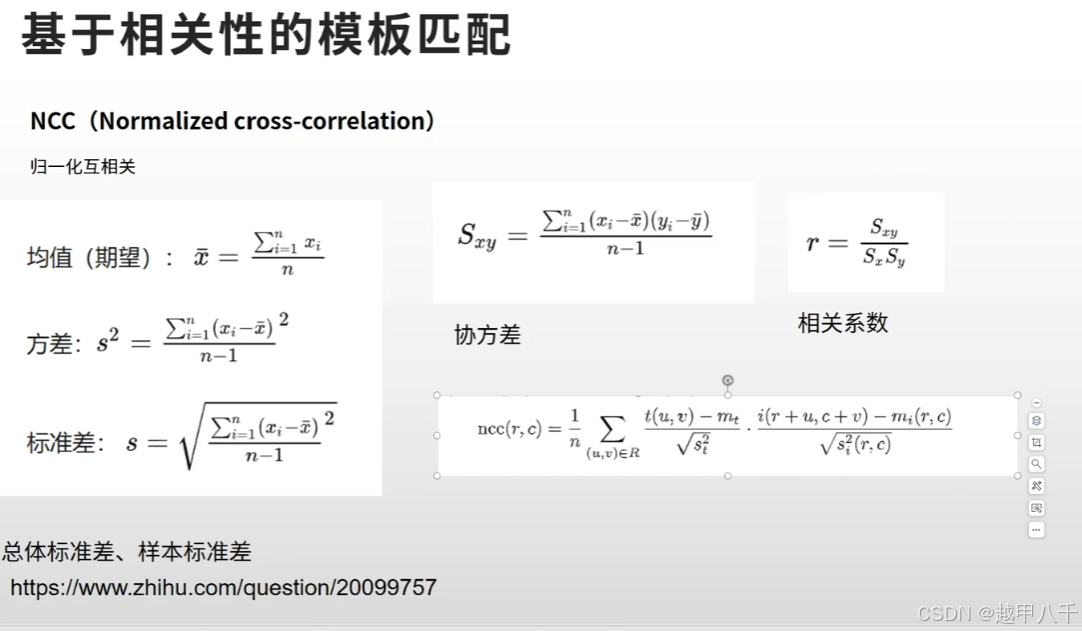
2. 相关性匹配(Correlation-Based Matching)
-
算法原理
通过计算模板与图像的归一化互相关(NCC),评估相似性。公式为:
[
NCC = \frac{\sum (T - \mu_T)(I - \mu_I)}{\sqrt{\sum (T - \mu_T)^2 \sum (I - \mu_I)^2}}
] -
应用场景
光照变化较小、需要抗噪声的场景(如印刷品缺陷检测)。 -
优点
- 对亮度变化鲁棒;
- 抗噪声能力较强。
-
缺点
- 对旋转和缩放敏感;
- 计算量较大。
-
Halcon 代码示例:
create_ncc_model(TemplateImage, 'auto', 0, 0, 'auto', 'use_polarity', &ModelID); find_ncc_model(SearchImage, ModelID, 0, 0, 0.8, 1, 0.5, 'true', 0, &Row, &Column, &Angle, &Score);
3. 形状匹配(Shape-Based Matching)
- 算法原理
基于目标的边缘或轮廓特征,使用金字塔分层搜索和相似性度量(如边缘方向差)。 - 应用场景
高精度定位、存在部分遮挡或光照变化的场景(如机械臂抓取)。 - 优点
- 抗光照变化和部分遮挡;
- 支持旋转、缩放和多目标检测。
- 缺点
- 需要清晰的边缘特征;
- 对模糊或低对比度图像效果差。
- Halcon 代码示例:
create_shape_model(TemplateImage, 'auto', 0, 0, 'auto', 'auto', 'use_polarity', 'auto', &ModelID); find_shape_model(SearchImage, ModelID, 0, 0, 0.8, 1, 0.5, 'least_squares', 0, 0.9, &Row, &Column, &Angle, &Score);
4. 组件匹配(Component-Based Matching)
- 算法原理
将目标分解为多个子组件(Component),分别匹配后通过几何约束(如相对位置)组合结果。 - 应用场景
复杂结构物体(如PCB板元件检测)或存在部分遮挡的场景。 - 优点
- 对遮挡和复杂结构鲁棒;
- 可处理多部件目标。
- 缺点
- 需要手动定义组件关系;
- 计算复杂度高。
- Halcon 代码示例:
// 定义组件模型 create_component_model(TemplateImage, ComponentRegions, 'auto', 'auto', 'auto', 'auto', 'auto', 'auto', &ComponentModelID); find_component_model(SearchImage, ComponentModelID, 'auto', 'auto', 0.8, 1, 0.5, 'none', 'use_polarity', 'auto', &ModelInstances);
5. 局部形变匹配(Local Deformation Matching)
- 算法原理
允许模板在局部发生形变(如弹性变形),通过**形变模型(Deformable Model)**匹配。 - 应用场景
柔性物体(如纺织品、橡胶件)或非刚性变形的目标。 - 优点
- 适应局部形变;
- 对非刚性物体鲁棒。
- 缺点
- 计算量大;
- 参数调整复杂。
- Halcon 代码示例:
create_local_deformable_model(TemplateImage, 'auto', 0, 0, 'auto', 'auto', 'auto', 'auto', &DeformModelID); find_local_deformable_model(SearchImage, DeformModelID, 0, 0, 0.8, 1, 0.5, 'least_squares', 0, 0.9, &Row, &Column, &Angle, &Scale, &Score);
6. 透视形变匹配(Perspective Deformation Matching)
- 算法原理
通过**透视变换(Homography)**模拟视角变化,支持模板的旋转、倾斜和缩放。 - 应用场景
视角变化较大的场景(如摄像头倾斜拍摄的物体)。 - 优点
- 适应3D视角变化;
- 高精度匹配。
- 缺点
- 需要标定相机参数;
- 计算资源消耗大。
- Halcon 代码示例:
create_planar_uncalib_deformable_model(TemplateImage, 'auto', 0, 0, 'auto', 'auto', 'auto', &ModelID); find_planar_uncalib_deformable_model(SearchImage, ModelID, 0, 0, 0.8, 1, 0.5, 'least_squares', 0, 0.9, &Row, &Column, &Angle, &Scale, &Score);
7. 描述符匹配(Descriptor-Based Matching)
- 算法原理
提取目标的特征描述符(如SIFT、SURF),通过描述符的相似性匹配。 - 应用场景
复杂纹理、部分遮挡或大视角变化的场景(如自然场景目标识别)。 - 优点
- 对旋转、缩放、光照变化鲁棒;
- 支持大范围变形。
- 缺点
- 特征提取耗时;
- 需要大量内存。
- Halcon 代码示例:
create_uncalib_descriptor_model(TemplateImage, 'sift', 'all', &ModelID); find_uncalib_descriptor_model(SearchImage, ModelID, 'threshold', 0.8, 1, 0.5, 'num_matches', 10, &Row, &Column, &Score);
8. 点匹配(Point-Based Matching)
- 算法原理
基于关键点(如角点、边缘点)的位置和几何关系进行匹配。 - 应用场景
特征点稀疏但稳定的场景(如标志物定位)。 - 优点
- 计算效率高;
- 对部分遮挡鲁棒。
- 缺点
- 需要显著的关键点;
- 对噪声敏感。
- Halcon 代码示例:
// 提取关键点 points_foerstner(TemplateImage, 1, 2, 3, 200, 0.3, 'gauss', 'true', &Row, &Col, &Size); create_calib_descriptor_model(TemplateImage, 'matching', Row, Col, &ModelID); find_calib_descriptor_model(SearchImage, ModelID, 'threshold', 0.8, 1, 0.5, &RowFound, &ColFound, &Score);
总结与选择建议
| 方法 | 适用场景 | 计算速度 | 鲁棒性 |
|---|---|---|---|
| 灰度值匹配 | 简单场景、光照稳定 | 快 | 低 |
| 相关性匹配 | 抗噪声、亮度变化 | 中 | 中 |
| 形状匹配 | 工业定位、部分遮挡 | 快 | 高 |
| 组件匹配 | 复杂结构、多部件目标 | 慢 | 高 |
| 局部形变匹配 | 弹性变形物体 | 慢 | 中 |
| 透视形变匹配 | 3D视角变化 | 慢 | 高 |
| 描述符匹配 | 自然场景、复杂纹理 | 慢 | 极高 |
| 点匹配 | 关键点显著的场景 | 中 | 中 |
注意事项:
- 工业检测优先选择形状匹配或组件匹配;
- 复杂场景(如自然图像)优先使用描述符匹配;
- 对速度要求高时选择灰度值或相关性匹配。


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









