




Problem Description
Ignatius被魔王抓走了,有一天魔王出差去了,这可是Ignatius逃亡的好机会.
魔王住在一个城堡里,城堡是一个A*B*C的立方体,可以被表示成A个B*C的矩阵,刚开始Ignatius被关在(0,0,0)的位置,离开城堡的门在(A-1,B-1,C-1)的位置,现在知道魔王将在T分钟后回到城堡,Ignatius每分钟能从一个坐标走到相邻的六个坐标中的其中一个.现在给你城堡的地图,请你计算出Ignatius能否在魔王回来前离开城堡(只要走到出口就算离开城堡,如果走到出口的时候魔王刚好回来也算逃亡成功),如果可以请输出需要多少分钟才能离开,如果不能则输出-1.
魔王住在一个城堡里,城堡是一个A*B*C的立方体,可以被表示成A个B*C的矩阵,刚开始Ignatius被关在(0,0,0)的位置,离开城堡的门在(A-1,B-1,C-1)的位置,现在知道魔王将在T分钟后回到城堡,Ignatius每分钟能从一个坐标走到相邻的六个坐标中的其中一个.现在给你城堡的地图,请你计算出Ignatius能否在魔王回来前离开城堡(只要走到出口就算离开城堡,如果走到出口的时候魔王刚好回来也算逃亡成功),如果可以请输出需要多少分钟才能离开,如果不能则输出-1.
Input
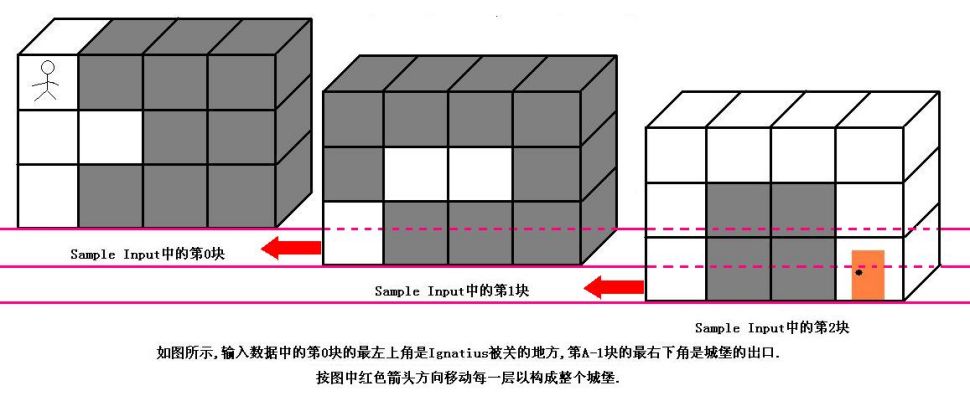
输入数据的第一行是一个正整数K,表明测试数据的数量.每组测试数据的第一行是四个正整数A,B,C和T(1<=A,B,C<=50,1<=T<=1000),它们分别代表城堡的大小和魔王回来的时间.然后是A块输入数据(先是第0块,然后是第1块,第2块......),每块输入数据有B行,每行有C个正整数,代表迷宫的布局,其中0代表路,1代表墙.(如果对输入描述不清楚,可以参考Sample Input中的迷宫描述,它表示的就是上图中的迷宫)
特别注意:本题的测试数据非常大,请使用scanf输入,我不能保证使用cin能不超时.在本OJ上请使用Visual C++提交.
特别注意:本题的测试数据非常大,请使用scanf输入,我不能保证使用cin能不超时.在本OJ上请使用Visual C++提交.
Output
对于每组测试数据,如果Ignatius能够在魔王回来前离开城堡,那么请输出他最少需要多少分钟,否则输出-1.
Sample Input
1 3 3 4 20 0 1 1 1 0 0 1 1 0 1 1 1 1 1 1 1 1 0 0 1 0 1 1 1 0 0 0 0 0 1 1 0 0 1 1 0
Sample Output
11
思路 直接BFS就可以但有几个需要注意的点
1.提交的时候不能用G++ 一定要用C++否则会超时,
2.BFS的时候不能用优先队列只能用普通队列否则也会超时,
3.起点为墙的时候也可以走
4.终点为墙的时候出不去,需要直接判断,否则会超时
5.cin cout 超时
6.BFS要用visit数组一个点走一次就够了
#include <iostream> #include <queue> #include <cstdio> #include <cstring> using namespace std; struct node { int x,y,z,c; int step; }map[51][51][51]; node now,Next; int A,B,C,st; int div_x[6] = {0, 0, 0, 0, 1, -1};//方向 int div_y[6] = {0, 0, 1, -1, 0, 0}; int div_z[6] = {1, -1, 0, 0, 0, 0}; int visit[51][51][51]; void BFS() { int num = 0; queue<node>s; // if(map[0][0][0].c!=1) s.push(map[0][0][0]); visit[0][0][0] = 1; while(!s.empty()&&map[A-1][B-1][C-1].c == 0) { now = s.front(); s.pop(); if(now.x == A-1&&now.y == B-1&&now.z == C-1) { printf("%d\n",now.step); return; } int k; for(k = 0;k<6;k++) { Next.x = now.x + div_x[k]; Next.y = now.y + div_y[k]; Next.z = now.z + div_z[k]; Next.step = now.step; if(Next.x<0||Next.x>=A||Next.y<0||Next.y>=B||Next.z<0||Next.z>=C){continue;}//判断是否越界 if(map[Next.x][Next.y][Next.z].c == 1){continue;}//判断是不是墙 if(visit[Next.x][Next.y][Next.z] == 1){continue;}//判断是否被遍历 map[Next.x][Next.y][Next.z].step = Next.step+1; if(map[Next.x][Next.y][Next.z].step>st){continue;}判断步数多没多 s.push(map[Next.x][Next.y][Next.z]); visit[Next.x][Next.y][Next.z] = 1; } } printf("-1\n"); } int main() { int T; scanf("%d",&T); while(T--) { memset(visit,0,sizeof(visit)); int i,j,k; scanf("%d%d%d%d",&A,&B,&C,&st); for(i = 0;i<A;i++) for(j = 0;j<B;j++) for(k = 0;k<C;k++) { scanf("%d",&map[i][j][k].c); map[i][j][k].x = i; map[i][j][k].y = j; map[i][j][k].z = k; map[i][j][k].step = 0; } BFS(); } return 0; }

















 986
986

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









