



一、 产品简介
图观团队提供 规模庞大、效果惊艳的 L1-L4级 室外场景 构建服务。不论是大范围行政区域地块,还是精细化区建筑、设施,都可提供从基础数据采集生成、到场景整合构建、再到场景服务发布的全流程实施服务,最终构建出各方面都符合项目需求的完美场景!
二、 产品功能
1. L1 场景构建
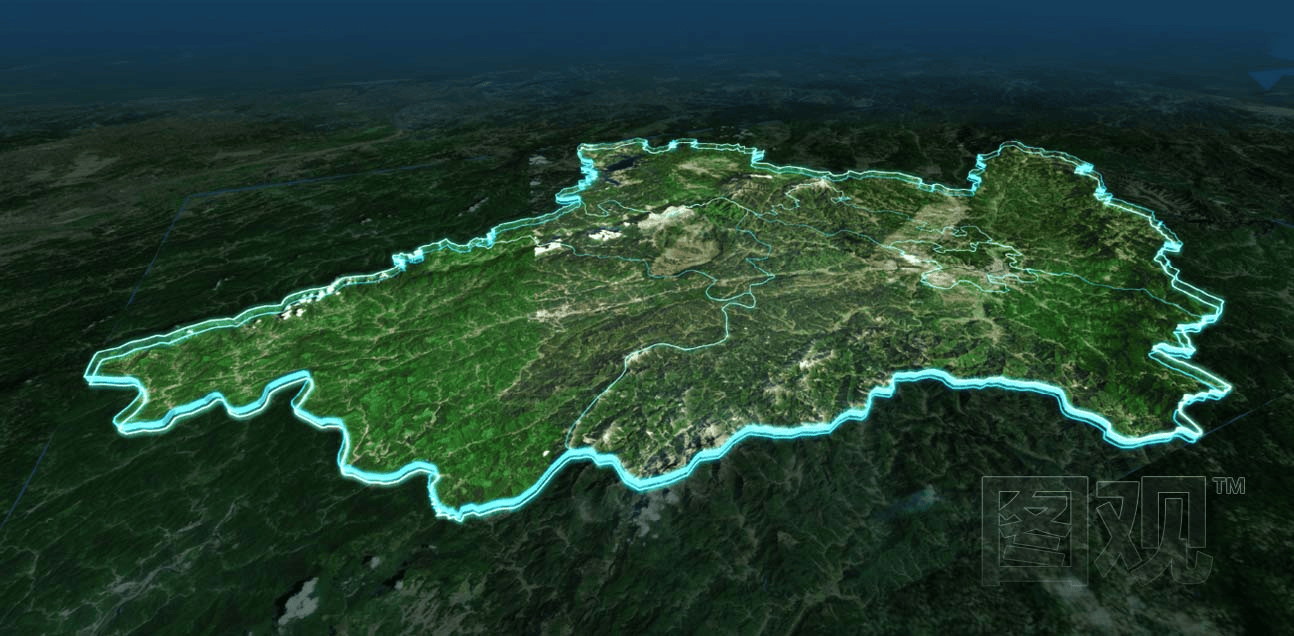
以 地理板块 形式,表现 国家、省市、地区 等大范围区划 的状态,目标位置、数据分布等 业务要素,适用于大范围宏观 孪生态势监测。
场景包含地形、地貌、山脉、行政区划、区划地名等要素信息, 适合最小观看距离 10 公里的 数字孪生场景。
2. L2 场景构建
以 三维实景 形式,中等精度 表现 城市范围 的城市外观、状态,目标位置、数据分布等 业务要素,适用于 城市宏观 孪生态势监测。
场景包含地形、地貌、山脉、行政区划、区划地名、河流水体、大范围植被、骨干路网概要外观、建筑概要外观等要素信息,可真实反映昼夜、日照、云层、天气、季节等环境效果。适合最小观看距离 3 公里的 数字孪生场景。

3. L3 场景构建
以 三维实景 形式,高精度 表现 园区/街区范围的 场景外观、状态,目标位置、数据分布等 业务要素,适用于 街区/园区级 孪生态势监测。
场景包含精细化 地形地貌、路网、行政区划、河流水体、道路两侧植被、道路精细外观等要素信息,可真实反映昼夜、日照、云层、天气、季节等环境效果,支持融合实地倾斜摄影数据,适合最小观看距离 200米 的 数字孪生场景。

4. L4 场景构建
以 三维实景 形式,超高精度 表现 建筑/设施 周边范围的 场景外观、状态,目标位置、数据分布等 业务要素,适用于 建筑/设备级 孪生态势监测。
场景包含地形、地貌、山脉、行政区划、区划地名、河流水体、道路两侧植被、建筑 精确外观、道路 精确外观、设施 精确外观;可真实反映昼夜、日照、云层、天气、季节等环境效果,适合最小观察距离5米的数字孪生场景。


















 1449
1449

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









