



下载空工程模板:http://dl.vmall.com/c0zvk0kah0 。
第一步
确定你安装Xcode6之后在应用程序中的绝对路径是什么
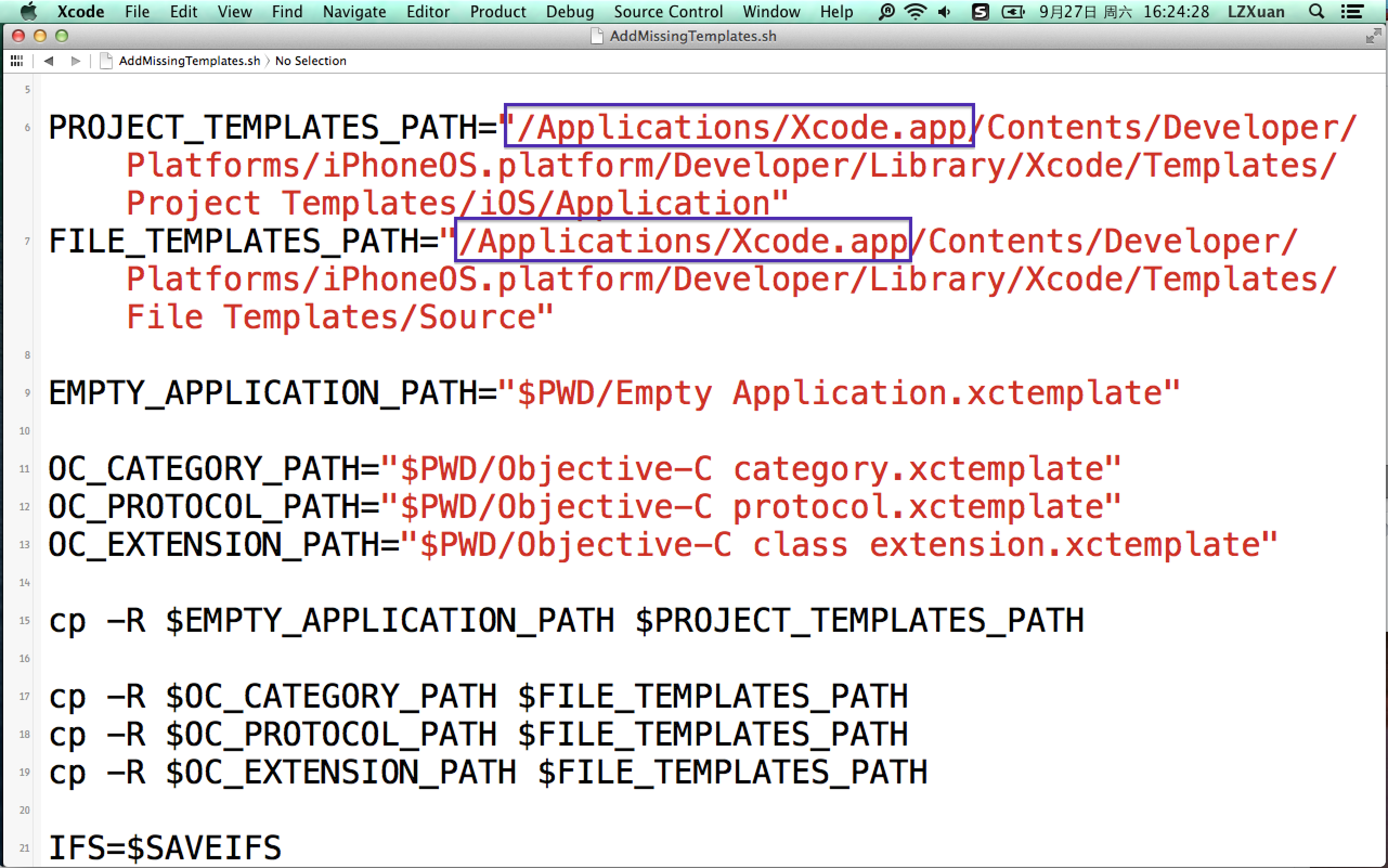
比如:xcode的绝对路径是/Applications/Xcode.app ,接下来打开AddMissingTemplates.sh文件,把下面图中蓝色框内的路径改为/Applications/Xcode.app,如果和蓝色框内的路径一样那么就不用修改了。
第二步
打开终端,用指令cd 进入目录 AddMissingTemplates-master,然后运行里面的脚本AddMissingTemplates.sh就ok了。
若提示Permission denied,执行以下命令运行脚本即可。
jinke:AddMissingTemplates-master jinke$ sudo -s bash-3.2# ./AddMissingTemplates.sh |
第三步
退出xcode 然后重新打开,就能看见可爱的空工程模板了。另外还增加了创建类别,协议,匿名类别的模板。
附件列表

















 499
499

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









