







本系列第二篇文章:基于树莓派的流星雨监测系统(RMS)的进一步改造(1)_delacroix_xu的专栏-优快云博客
本系列第三篇文章:基于树莓派的流星雨监测系统(RMS)的进一步改造(2)_delacroix_xu的专栏-优快云博客
背景:
近期开始使用一个开源项目,在树莓派4B上玩耍。监测流星雨并存储下来。
GitHub - CroatianMeteorNetwork/RMS: RPi Meteor Station
但官方文档略显复杂,此文章比较适用于试用USB摄像头的用户。如果您使用IP cemera rtsp方式接入,则需要参照官方文档进行。
设备选型
按照官方建议,选择索尼IMX291作为基础的摄像头了,某宝搜索,可以看到很多。选择一个USB3.0接口的。不贵,大概200多RMB
接下来要选择镜头,某宝购买摄像头会自带一个广角镜头,一般是光圈不大的。建议再购买大光圈的镜头。比如F1.2或F1.0的黑光镜头。M12接口即可。
接下来要选择树莓派,官方推荐树莓派4b。原因是三个进程合起来要试用2GB左右的内存,树莓派3b已经无法满足需求。至少要树莓派4b。
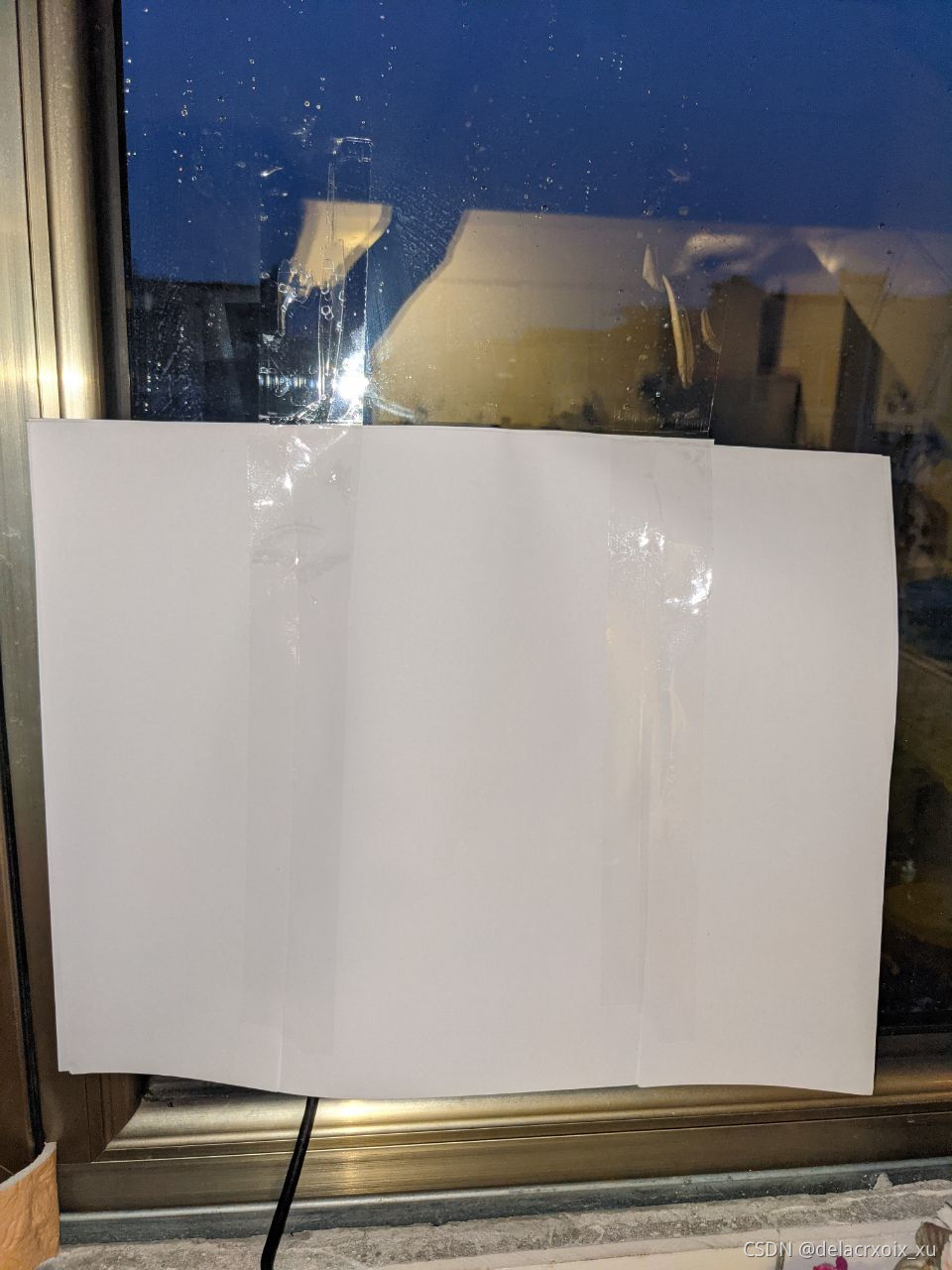
第一步,树莓派固定在墙上。用3M双面胶

摄像头用透明胶固定在玻璃上

最后关键一步,需要用几张纸给改起来,免得有玻璃反光。都是经验所得。楼下汽车路过,会有强光,之前有透明胶附着在摄像头周边,透明胶反光,会被误认为是火流星。
RMS安装过程
官方文档略显复杂,这里简化一下,对于需要使用IP camera rtsp方式推流的,可以使用 insall_opencv4.sh进行安装。 对于我,则可以简化,不需要编译opencv。
仅仅需要安装所需的 python库,就够了
第一步,创建venv
参考: 关于Python3中venv虚拟环境 - syncd - 博客园
第二步,激活venv
source /home/pi/your_venv/bin/activate
第三部,安装各种依赖库
python -m pip install xxxxxxx
由于GFW的原因,访问python官方pypi比较慢,这里推荐aliyun的国内镜像。
参考: python pip 切换阿里云镜像 - 静静别跑 - 博客园
参照官方文档,安装各种库
numpy scipy gitpython cython matplotlib 等
安装好依赖库后,再安装 setup.py
python setup.py install
这样RMS作为一个库,被安装到venv下
运行
python -m RMS.StartCapture
写个脚本, 开机自动启动
#!/bin/sh
set -x
. /home/pi/py37env/bin/activate
cnt=`ps aux| grep python | grep StartCapture | wc -l`
if [ $cnt -eq 0 ];then
rm -f 1.txt
nohup python -m RMS.StartCapture 1>1.txt 2>&1 &
fi加入crontab 自动运行
*/10 * * * * cd /home/pi/Desktop/RMS/RMS_new && sh start_by_cron.sh > start.log 2>&1
修改参数适配大城市光污染
配置文件在RMS根目录下,文件名叫 .config
vim编辑 .config
修改的diff如下:
; Enable/disable saving a live.jpg file in the data directory with the latest image
-live_jpg: false
+live_jpg: true
; Enable/disable showing a slideshow of last night's meteor detections on the screen during the day
slideshow_enable: false
@@ -114,7 +117,7 @@ win_pc_weave: -Wall
[Upload]
; Flag for enabling/disabling upload to server
-upload_enabled: true
+upload_enabled: false
; Delay upload for the given number of minutes
upload_delay: 0
; Server address
@@ -190,7 +193,7 @@ distance_threshold: 70
; Maximum allowed gap between points
gap_threshold: 150
; Minimum range of frames that a line should cover (eliminates flash detections)
-line_minimum_frame_range: 6
+line_minimum_frame_range: 2
; Constant that determines the influence of average point distance on the line quality
line_distance_const: 4
; Ratio of how many points must be close to the line before considering searching for another line
@@ -202,7 +205,7 @@ max_lines: 5
[MeteorDetection]
; Minimum number of stars required in order to run the detection
-ff_min_stars = 20
+ff_min_stars = 1
; Binning (only supported for videos, images, and vid files, but no FF files!)
; -------
@@ -252,7 +255,7 @@ gap_threshold_det: 50
; Minimum number of pixels in a strip
min_pixels_det: 10
; Minimum number of frames per one detection
-line_minimum_frame_range_det: 4
+line_minimum_frame_range_det: 2
; Constant that determines the influence of average point distance on the line quality
line_distance_const_det: 4
; Maximum time in seconds for which line finding algorithm can run
@@ -279,7 +282,7 @@ ang_vel_max: 51.0 ; deg/s
; Filtering by intensity
; By default the peak of the meteor should be at least 16x brighter than the background. This is the
; multiplier that scales this number (1.0 = 16x).
-min_patch_intensity_multiplier: 2.5
+min_patch_intensity_multiplier: 0.25说明:
line_minimum_frame_range是一个过滤规则,流星轨迹至少要持续多少frame,这里从原来的6帧,改为2帧
ff_min_start是一个过滤规则,不能达到识别到20颗行,就不会执行流星检测逻辑。这里改为1,只要画面里识别到一颗星,就会进行流星监测。
line_minimum_frame_range_det:这个参数,也是一个过滤器,由4改为2,至少4帧改为至少2帧
min_path_intensity_multiplier:这个参数,也是一个过滤器,要求流星要比背景亮多少倍才算流星,否则就不算流星。这里从原来的2.5修改为0.25。原因是大城市光污染大,背景比较亮
监测时间的修改
监测时间改为晚上11点以后,等屋子的等确定不亮了再开始。否则会引来很多飞虫,飞虫的轨迹,会被误判为火流星。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









