



 本文详细介绍了机器人的组成结构,包括执行机构、驱动系统、传感系统和控制系统,并深入探讨了机器人的系统构建过程,涉及机器人底盘、电机、舵机等动力部分的驱动系统设计以及内外部传感系统的应用。
本文详细介绍了机器人的组成结构,包括执行机构、驱动系统、传感系统和控制系统,并深入探讨了机器人的系统构建过程,涉及机器人底盘、电机、舵机等动力部分的驱动系统设计以及内外部传感系统的应用。
一、机器人的组成
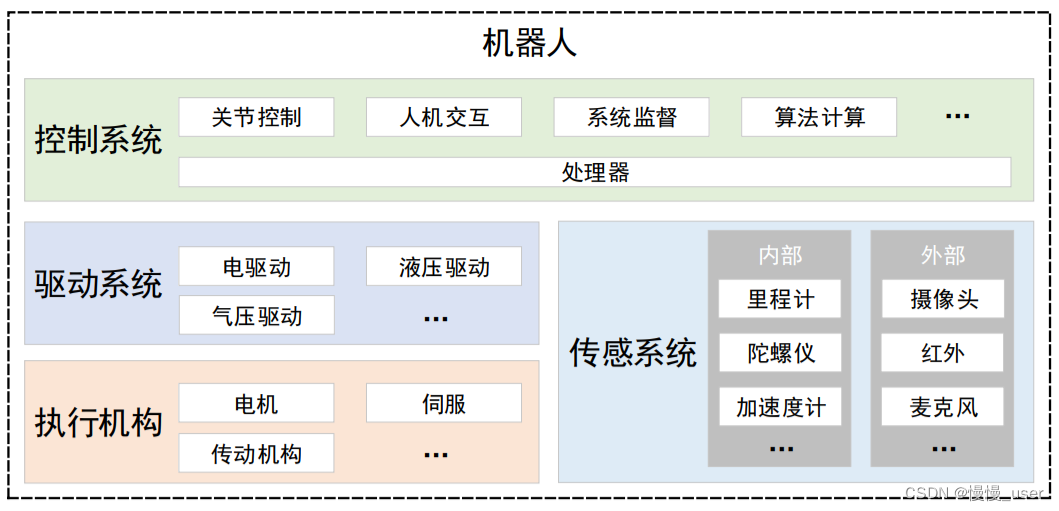
1、Robot组成结构
2、Robot控制回路
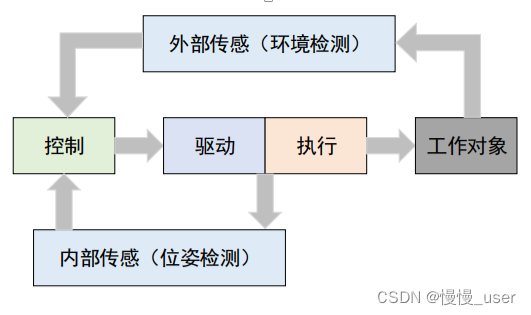
执行机构:人体的手和脚,直接面向工作对象的机械装置;
驱动系统:人体的肌肉和筋络,负责驱动执行机构,将控制系统下达的命令转换为执行机构需要的信号;
传感系统:人体的感官和神经,主要完成信号的输入和反馈,包括内部传感系统和外部传感系统;
控制系统:人体的大脑,实现任务及信息的处理,输出控制信号。
二、系统构建
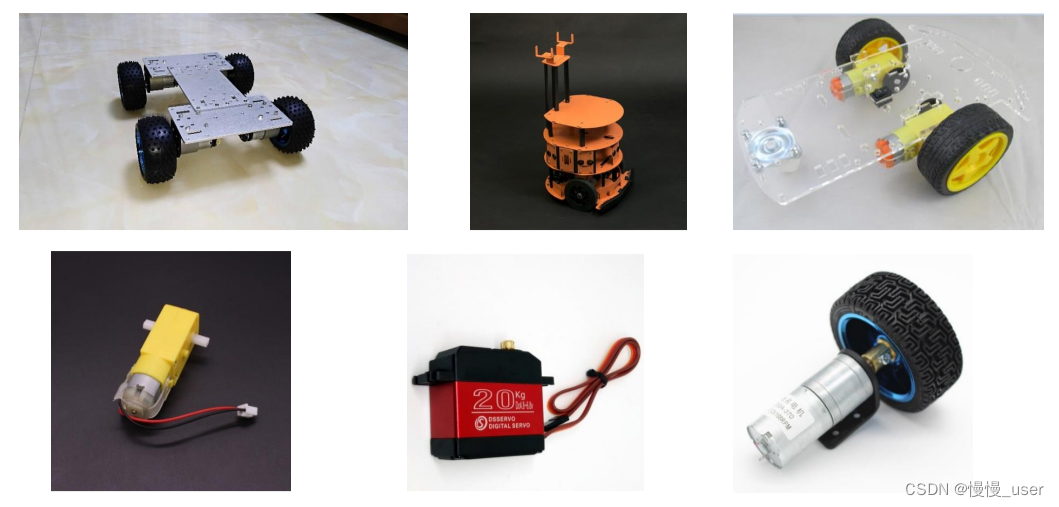
执行结构
机器人底盘、电机、舵机等动力部分
驱动系统
1、电源子系统
12v/5v/3v;
电源保护、滤波。
2、电机驱动子系统
电机驱动:控制信号——>电信号
电机控制:闭环驱动
3、传感器接口
超声波
里程计
...
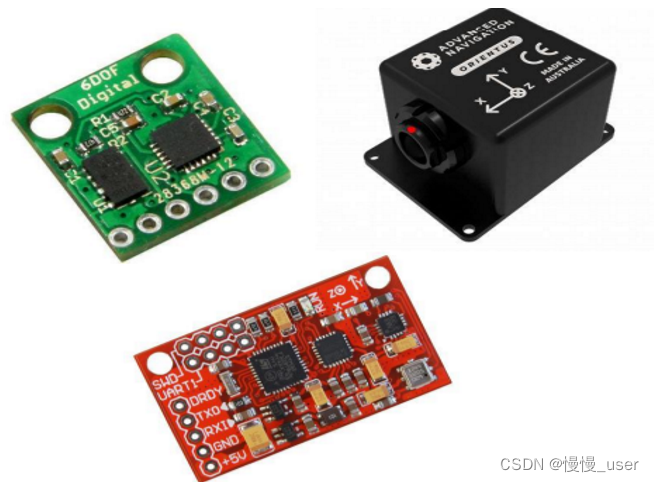
内部传感系统
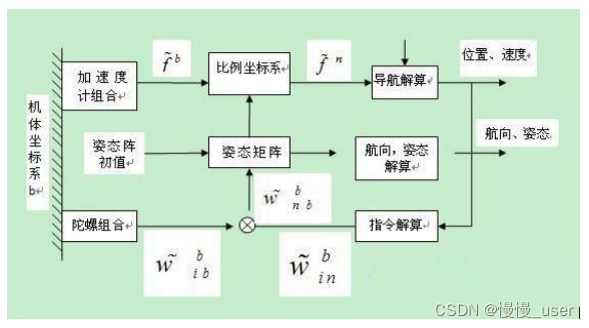
1、常用IMU(惯性处理单元):
三轴加速度计、磁力计、三轴陀螺
2、IMU实现原理
控制系统常用框架
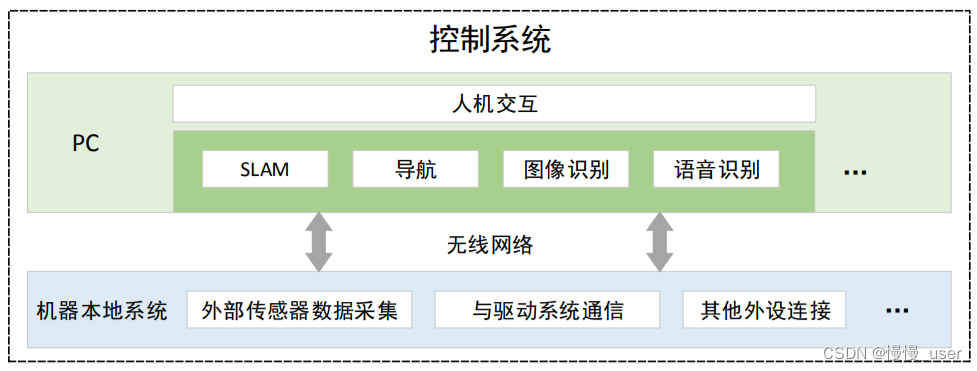
外部传感系统
超声波模块、深度相机等


















 1686
1686

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









