




 本文详细介绍了ACPWorkbench软件的功能,包括文件操作(导入导出设置、导出FlashBIN文件),设置菜单(通讯类型、采样率、MCLK源),下载与固件升级,音效控制,以及音频模块(如ADC、DAC、I2S)的详细配置选项。
本文详细介绍了ACPWorkbench软件的功能,包括文件操作(导入导出设置、导出FlashBIN文件),设置菜单(通讯类型、采样率、MCLK源),下载与固件升级,音效控制,以及音频模块(如ADC、DAC、I2S)的详细配置选项。
一、菜单
文件菜单包含导入导出所有参数,导出flashbin文件和退出操作。文件菜单显示如下:
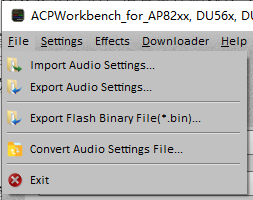
Import Audio Settings:从音频配置文件中导入音频参数。
Export Audio Settings:将音频设置导出为音频配置文件。
Export Flash Binary File:导出带配置的FLASH BIN文件。
Convert Audio Settings File: 当导入的 INI 文件与当前固件的中版本号或大版 本号不同时,ACPWorkbench禁止导入,用于防止版本不同引入的错误。如 果需要使用旧版本INI文件中的参数,需要通过ConvertAudioSettingsFile 去转换INI文件,转换后的INI文件便可导入当前固件。
二、设置
设置菜单包含了通讯类型选择,全局采样率选择和全局MCLK源选择操作, 设置菜单如下所示
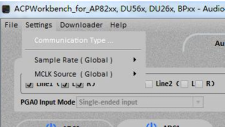
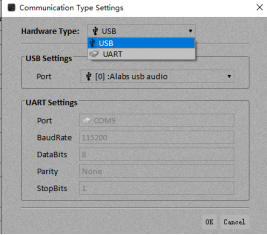
Communication type: 包含两种 UART 和 USB 两种通讯方式,通过点击。
Communication Type 会弹出通讯方式的设置界面如下图所示:
Sample rate ( global ): 包含 Inactive 和 9 种采样率(8000-48000Hz)。选择 9 种采样率时,全局采样率使能,所有的音效模块按照当前采样率配置;选择 Inactive 时,全局采样率不起效,每个音效模块按照局部采样率参数进行配置
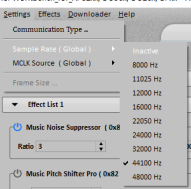
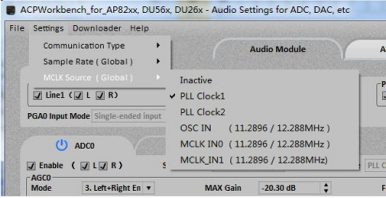
MCLKsource ( global ):包含Inactive 和5种MCLK 源选择。选择5种MCLK 源:PLLClock1、PLLClock2、OSC IN、MCLK IN0、MCLK IN1 以及全局MCLK 无效Inactive;选择5种源时,局部MCLK源不起作用;选择Inactive时,全局 MCLK源不起效,每个模块按照局部MCLK源进行配置
三、下载
ACPWorkbench.exe 支持在线固件升级功能,通过点击“Downloader”菜单, “Firmware Upgrader”窗口就会弹出来。然后选择下载的bin文件,点击下载按钮
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2139
2139

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









