




栈的概念
栈是一种特殊的线性表,其只允许在固定的一端进行插入和删除元素。进行数据插入和删除操作的一端称为栈顶,另外一端称为栈底。
栈中的数据元素遵守后进先出LIFO(Last In First Out)的原则。
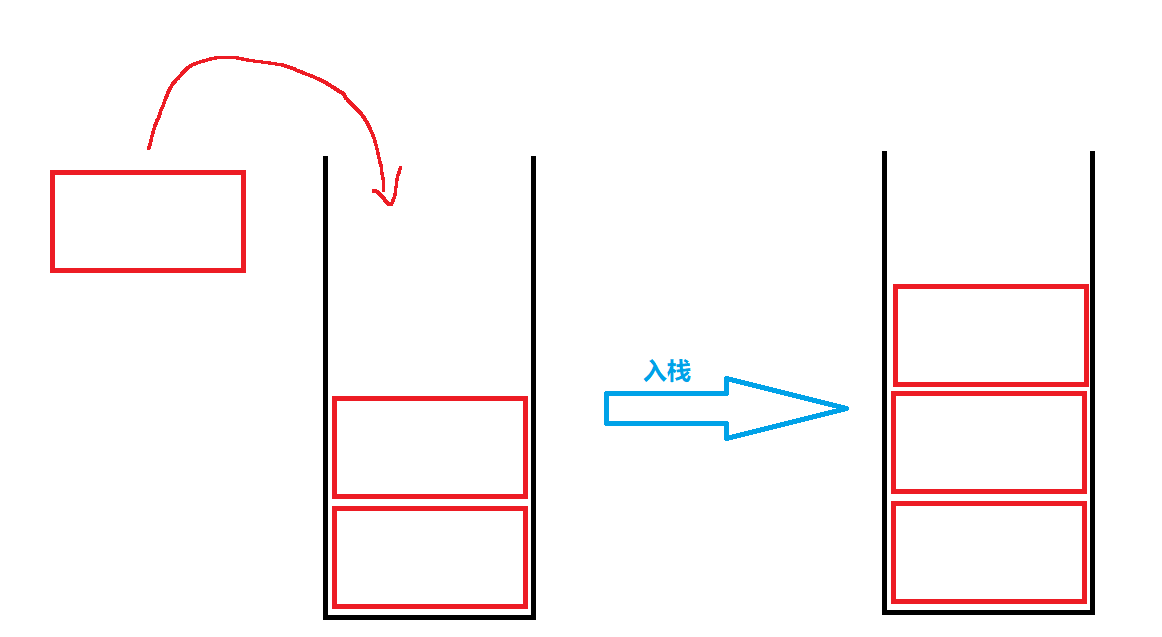
压栈:栈的插入操作叫做进栈/压栈/入栈。入数据在栈顶。
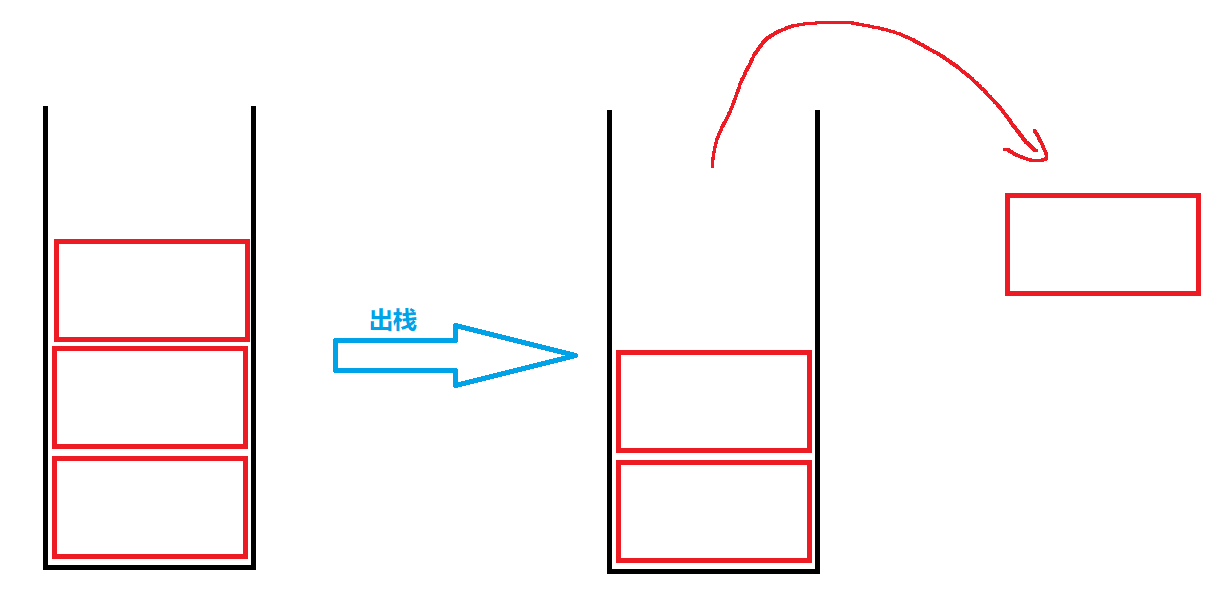
出栈:栈的删除操作叫做出栈。出数据也在栈顶。
栈的实现

栈可以使用数组或者链表进行实现,由于数组进行尾插和尾删较快,所以使用数组较为合适,数组唯一的弊端就是扩容,而链表每次添加数据都需要扩容。
如果使用链表,使用单链表即可,将单链表的头部当作栈顶,这样进行栈顶的删除和添加较为迅速。
静态栈
// 静态栈
#define N 10
struct Stack
{
int a[N];
int top;
};
实际使用中一般不会使用静态栈
动态栈
栈的结构体
// 动态栈
typedef int STDataType;
typedef struct Stack
{
// 指向动态数组的指针
STDataType* a;
// 栈顶元素的下标
STDataType top;
// 容量
size_t capatity;
}ST;
栈中需要包含3个元素,分别是指向数组的指针,栈顶元素的下标,栈的容量
初始化栈
// 初始化栈
void STInit(ST* ps)
{
assert(ps);
// 初始化容量设置成4个
ps->a = (STDataType*)malloc(sizeof(STDataType) * 4);
if (ps->a == NULL)
{
perror("malloc fail!\n");
return;
}
ps->capatity = 4;
// 初始化元素的数据为空,栈顶元素的下标为-1;
ps->top = -1;
}
- 初始化容量设置成4
- 初始化时,元素中没有数据,将指向栈顶元素的下标设置成 -1.
【注意】刚初始化数组的时候,此时访问栈顶元素,会越界访问
栈的销毁
// 栈的销毁
void STDestory(ST* ps)
{
assert(ps);
free(ps->a);
ps->capatity = 0;
ps->top = 0;
ps->a = NULL;
}
此时会出现一个问题,销毁ps时,需要传递二级指针吗?
【答】不需要,ps这个指针虽然时传值拷贝过来的,但是传递的结构体却是地址。但是如果这个函数体里将ps = NULLl;置空,不会使实参置空,所以这个是没有意义的。
入栈
// 入栈
void STPush(ST* ps, STDataType x)
{
assert(ps);
if (ps->top == ps->top)
{
ST* tmp = (STDataType* )realloc(ps->a, sizeof(STDataType) * ps->capatity * 2);
if (tmp == NULL)
{
perror("realloc fail!\n");
return;
}
ps->a = tmp;
tmp = NULL;
ps->capatity *= 2;
}
ps->top++;
ps->a[ps->top] = x;
}
入栈需要扩容,由于top指向的是栈顶元素的下标,所以需要先将top+1,再入栈
判断栈是否为空
// 判空
bool STEmpty(ST* ps)
{
assert(ps);
return ps->top == -1;
}
由于top指的是栈顶元素的下标,没有元素的时候,top应该为-1
出栈
// 出栈
void STpop(ST* ps)
{
assert(ps);
// 如果栈为空
assert(!STEmpty(ps));
ps->top--;
}
出栈的时候,直接将top减一即可,但是需要注意栈为空的情况。
查找元素个数
// 元素个数
size_t STSize(ST* ps)
{
assert(ps);
return ps->top + 1;
}
元素个数等于下标元素+1
访问栈顶元素
// 访问栈顶元素
STDataType STTop(ST* ps)
{
assert(ps);
if (ps->top > 0)
{
return ps->a[ps->top];
}
else
{
perror("top fail\n");
return INT_MIN;
}
}
访问栈顶元素的时候,需要防止访问空栈
栈的优点和缺点
优点
- 入栈和出栈效率高,时间复杂度为O(1),仅仅操作栈顶元素
- 结构简单,容易实现,底层可以是数组或者链表
缺点
- 无法随机访问中间元素,如果想要访问元素比较依次将数据从栈顶弹出
- 基于数组实现的栈存在容量限制,扩容时需要重新分配元素
- 基于链表实现的栈每一个结点都需要存储指针,空间开销较大。
栈的代码实现
Stack.h头文件
#ifndef STACK_H_
#define STACK_H_
#include<stdio.h>
#include<stdlib.h>
#include<stdbool.h>
#include<assert.h>
// 静态栈
//#define N 10
//struct Stack
//{
// int a[N];
// int top;
//};
// 动态栈
typedef int STDataType;
typedef struct Stack
{
// 指向动态数组的指针
STDataType* a;
// 栈顶元素的下标
STDataType top;
// 容量
size_t capatity;
}ST;
// 初始化栈
void STInit(ST* ps);
// 栈的销毁
void STDestory(ST* ps);
// 入栈
void STPush(ST* ps, STDataType x);
// 判空
bool STEmpty(ST* ps);
// 出栈
void STpop(ST* ps);
// 元素个数
size_t STSize(ST* ps);
// 访问栈顶元素
STDataType STTop(ST* ps);
#endif // !STACK_H_
Stack.c源文件
#include"Stack.h"
// 初始化栈
void STInit(ST* ps)
{
assert(ps);
// 初始化容量设置成4个
ps->a = (STDataType*)malloc(sizeof(STDataType) * 4);
if (ps->a == NULL)
{
perror("malloc fail!\n");
return;
}
ps->capatity = 4;
// 初始化元素的数据为空,栈顶元素的下标为-1;
ps->top = -1;
}
// 栈的销毁
void STDestory(ST* ps)
{
assert(ps);
free(ps->a);
ps->capatity = 0;
ps->top = 0;
ps->a = NULL;
}
// 入栈
void STPush(ST* ps, STDataType x)
{
assert(ps);
if (ps->top == ps->top)
{
ST* tmp = (STDataType* )realloc(ps->a, sizeof(STDataType) * ps->capatity * 2);
if (tmp == NULL)
{
perror("realloc fail!\n");
return;
}
ps->a = tmp;
tmp = NULL;
ps->capatity *= 2;
}
ps->top++;
ps->a[ps->top] = x;
}
// 判空
bool STEmpty(ST* ps)
{
assert(ps);
return ps->top == -1;
}
// 出栈
void STpop(ST* ps)
{
assert(ps);
// 如果栈为空
assert(!STEmpty(ps));
ps->top--;
}
// 元素个数
size_t STSize(ST* ps)
{
assert(ps);
return ps->top + 1;
}
// 访问栈顶元素
STDataType STTop(ST* ps)
{
assert(ps);
if (ps->top > 0)
{
return ps->a[ps->top];
}
else
{
perror("top fail\n");
return INT_MIN;
}
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









