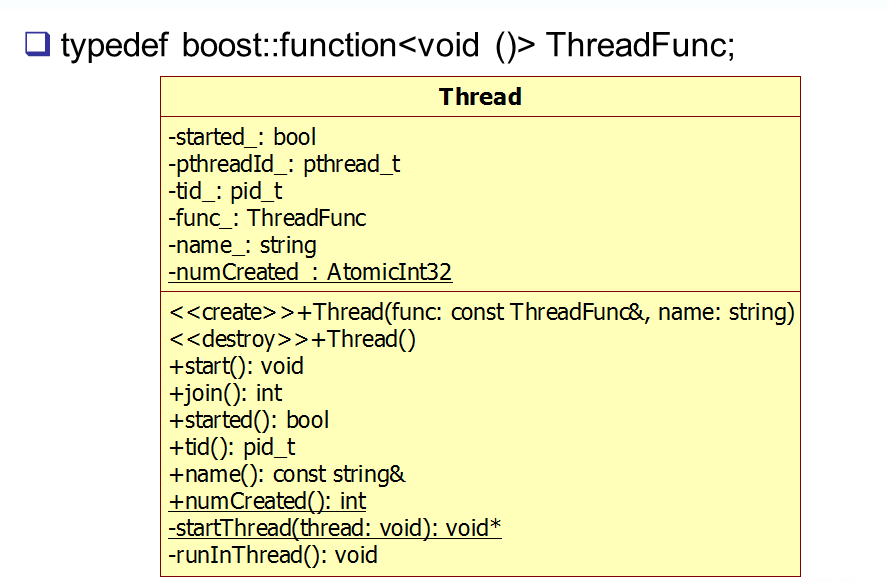
一、Thread类
#include <muduo/base/Thread.h>
#include <muduo/base/CurrentThread.h>
#include <muduo/base/Exception.h>
#include <muduo/base/Logging.h>
#include <type_traits>
#include <errno.h>
#include <stdio.h>
#include <unistd.h>
#include <sys/prctl.h>
#include <sys/syscall.h>
#include <sys/types.h>
#include <linux/unistd.h>
namespace muduo
{
namespace detail
{
pid_t gettid()
{
return static_cast<pid_t>(::syscall(SYS_gettid));
}
void afterFork()
{
muduo::CurrentThread::t_cachedTid = 0;
muduo::CurrentThread::t_threadName = "main";
CurrentThread::tid();
}
class ThreadNameInitializer
{
public:
ThreadNameInitializer()
{
muduo::CurrentThread::t_threadName = "main";
CurrentThread::tid();
pthread_atfork(NULL, NULL, &afterFork);
}
};
ThreadNameInitializer init;
struct ThreadData
{
typedef muduo::Thread::ThreadFunc ThreadFunc;
ThreadFunc func_;
string name_;
pid_t* tid_;
CountDownLatch* latch_;
ThreadData(ThreadFunc func,
const string& name,
pid_t* tid,
CountDownLatch* latch)
: func_(std::move(func)),
name_(name),
tid_(tid),
latch_(latch)
{ }
void runInThread()
{
*tid_ = muduo::CurrentThread::tid();
tid_ = NULL;
latch_->countDown();
latch_ = NULL;
muduo::CurrentThread::t_threadName = name_.empty() ? "muduoThread" : name_.c_str();
::prctl(PR_SET_NAME, muduo::CurrentThread::t_threadName);
try
{
func_();
muduo::CurrentThread::t_threadName = "finished";
}
catch (const Exception& ex)
{
muduo::CurrentThread::t_threadName = "crashed";
fprintf(stderr, "exception caught in Thread %s\n", name_.c_str());
fprintf(stderr, "reason: %s\n", ex.what());
fprintf(stderr, "stack trace: %s\n", ex.stackTrace());
abort();
}
catch (const std::exception& ex)
{
muduo::CurrentThread::t_threadName = "crashed";
fprintf(stderr, "exception caught in Thread %s\n", name_.c_str());
fprintf(stderr, "reason: %s\n", ex.what());
abort();
}
catch (...)
{
muduo::CurrentThread::t_threadName = "crashed";
fprintf(stderr, "unknown exception caught in Thread %s\n", name_.c_str());
throw;
}
}
};
void* startThread(void* obj)
{
ThreadData* data = static_cast<ThreadData*>(obj);
data->runInThread();
delete data;
return NULL;
}
}
void CurrentThread::cacheTid()
{
if (t_cachedTid == 0)
{
t_cachedTid = detail::gettid();
t_tidStringLength = snprintf(t_tidString, sizeof t_tidString, "%5d ", t_cachedTid);
}
}
bool CurrentThread::isMainThread()
{
return tid() == ::getpid();
}
void CurrentThread::sleepUsec(int64_t usec)
{
struct timespec ts = { 0, 0 };
ts.tv_sec = static_cast<time_t>(usec / Timestamp::kMicroSecondsPerSecond);
ts.tv_nsec = static_cast<long>(usec % Timestamp::kMicroSecondsPerSecond * 1000);
::nanosleep(&ts, NULL);
}
AtomicInt32 Thread::numCreated_;
Thread::Thread(ThreadFunc func, const string& n)
: started_(false),
joined_(false),
pthreadId_(0),
tid_(0),
func_(std::move(func)),
name_(n),
latch_(1)
{
setDefaultName();
}
Thread::~Thread()
{
if (started_ && !joined_)
{
pthread_detach(pthreadId_);
}
}
void Thread::setDefaultName()
{
int num = numCreated_.incrementAndGet();
if (name_.empty())
{
char buf[32];
snprintf(buf, sizeof buf, "Thread%d", num);
name_ = buf;
}
}
void Thread::start()
{
assert(!started_);
started_ = true;
detail::ThreadData* data = new detail::ThreadData(func_, name_, &tid_, &latch_);
if (pthread_create(&pthreadId_, NULL, &detail::startThread, data))
{
started_ = false;
delete data;
LOG_SYSFATAL << "Failed in pthread_create";
}
else
{
latch_.wait();
assert(tid_ > 0);
}
}
int Thread::join()
{
assert(started_);
assert(!joined_);
joined_ = true;
return pthread_join(pthreadId_, NULL);
}
}
二、Mutex类

#ifndef MUDUO_BASE_MUTEX_H
#define MUDUO_BASE_MUTEX_H
#include <muduo/base/CurrentThread.h>
#include <muduo/base/noncopyable.h>
#include <assert.h>
#include <pthread.h>
#if defined(__clang__) && (!defined(SWIG))
#define THREAD_ANNOTATION_ATTRIBUTE__(x) __attribute__((x))
#else
#define THREAD_ANNOTATION_ATTRIBUTE__(x)
#endif
#define CAPABILITY(x) \
THREAD_ANNOTATION_ATTRIBUTE__(capability(x))
#define SCOPED_CAPABILITY \
THREAD_ANNOTATION_ATTRIBUTE__(scoped_lockable)
#define GUARDED_BY(x) \
THREAD_ANNOTATION_ATTRIBUTE__(guarded_by(x))
#define PT_GUARDED_BY(x) \
THREAD_ANNOTATION_ATTRIBUTE__(pt_guarded_by(x))
#define ACQUIRED_BEFORE(...) \
THREAD_ANNOTATION_ATTRIBUTE__(acquired_before(__VA_ARGS__))
#define ACQUIRED_AFTER(...) \
THREAD_ANNOTATION_ATTRIBUTE__(acquired_after(__VA_ARGS__))
#define REQUIRES(...) \
THREAD_ANNOTATION_ATTRIBUTE__(requires_capability(__VA_ARGS__))
#define REQUIRES_SHARED(...) \
THREAD_ANNOTATION_ATTRIBUTE__(requires_shared_capability(__VA_ARGS__))
#define ACQUIRE(...) \
THREAD_ANNOTATION_ATTRIBUTE__(acquire_capability(__VA_ARGS__))
#define ACQUIRE_SHARED(...) \
THREAD_ANNOTATION_ATTRIBUTE__(acquire_shared_capability(__VA_ARGS__))
#define RELEASE(...) \
THREAD_ANNOTATION_ATTRIBUTE__(release_capability(__VA_ARGS__))
#define RELEASE_SHARED(...) \
THREAD_ANNOTATION_ATTRIBUTE__(release_shared_capability(__VA_ARGS__))
#define TRY_ACQUIRE(...) \
THREAD_ANNOTATION_ATTRIBUTE__(try_acquire_capability(__VA_ARGS__))
#define TRY_ACQUIRE_SHARED(...) \
THREAD_ANNOTATION_ATTRIBUTE__(try_acquire_shared_capability(__VA_ARGS__))
#define EXCLUDES(...) \
THREAD_ANNOTATION_ATTRIBUTE__(locks_excluded(__VA_ARGS__))
#define ASSERT_CAPABILITY(x) \
THREAD_ANNOTATION_ATTRIBUTE__(assert_capability(x))
#define ASSERT_SHARED_CAPABILITY(x) \
THREAD_ANNOTATION_ATTRIBUTE__(assert_shared_capability(x))
#define RETURN_CAPABILITY(x) \
THREAD_ANNOTATION_ATTRIBUTE__(lock_returned(x))
#define NO_THREAD_SAFETY_ANALYSIS \
THREAD_ANNOTATION_ATTRIBUTE__(no_thread_safety_analysis)
#ifdef CHECK_PTHREAD_RETURN_VALUE
#ifdef NDEBUG
__BEGIN_DECLS
extern void __assert_perror_fail (int errnum,
const char *file,
unsigned int line,
const char *function)
noexcept __attribute__ ((__noreturn__));
__END_DECLS
#endif
#define MCHECK(ret) ({ __typeof__ (ret) errnum = (ret); \
if (__builtin_expect(errnum != 0, 0)) \
__assert_perror_fail (errnum, __FILE__, __LINE__, __func__);})
#else
#define MCHECK(ret) ({ __typeof__ (ret) errnum = (ret); \
assert(errnum == 0); (void) errnum;})
#endif
namespace muduo
{
class CAPABILITY("mutex") MutexLock : noncopyable
{
public:
MutexLock()
: holder_(0)
{
MCHECK(pthread_mutex_init(&mutex_, NULL));
}
~MutexLock()
{
assert(holder_ == 0);
MCHECK(pthread_mutex_destroy(&mutex_));
}
bool isLockedByThisThread() const
{
return holder_ == CurrentThread::tid();
}
void assertLocked() const ASSERT_CAPABILITY(this)
{
assert(isLockedByThisThread());
}
void lock() ACQUIRE()
{
MCHECK(pthread_mutex_lock(&mutex_));
assignHolder();
}
void unlock() RELEASE()
{
unassignHolder();
MCHECK(pthread_mutex_unlock(&mutex_));
}
pthread_mutex_t* getPthreadMutex()
{
return &mutex_;
}
private:
friend class Condition;
class UnassignGuard : noncopyable
{
public:
explicit UnassignGuard(MutexLock& owner)
: owner_(owner)
{
owner_.unassignHolder();
}
~UnassignGuard()
{
owner_.assignHolder();
}
private:
MutexLock& owner_;
};
void unassignHolder()
{
holder_ = 0;
}
void assignHolder()
{
holder_ = CurrentThread::tid();
}
pthread_mutex_t mutex_;
pid_t holder_;
};
class SCOPED_CAPABILITY MutexLockGuard : noncopyable
{
public:
explicit MutexLockGuard(MutexLock& mutex) ACQUIRE(mutex)
: mutex_(mutex)
{
mutex_.lock();
}
~MutexLockGuard() RELEASE()
{
mutex_.unlock();
}
private:
MutexLock& mutex_;
};
}
#define MutexLockGuard(x) error "Missing guard object name"
#endif
三、Condition类

#ifndef MUDUO_BASE_CONDITION_H
#define MUDUO_BASE_CONDITION_H
#include <muduo/base/Mutex.h>
#include <pthread.h>
namespace muduo
{
class Condition : noncopyable
{
public:
explicit Condition(MutexLock& mutex)
: mutex_(mutex)
{
MCHECK(pthread_cond_init(&pcond_, NULL));
}
~Condition()
{
MCHECK(pthread_cond_destroy(&pcond_));
}
void wait()
{
MutexLock::UnassignGuard ug(mutex_);
MCHECK(pthread_cond_wait(&pcond_, mutex_.getPthreadMutex()));
}
bool waitForSeconds(double seconds);
void notify()
{
MCHECK(pthread_cond_signal(&pcond_));
}
void notifyAll()
{
MCHECK(pthread_cond_broadcast(&pcond_));
}
private:
MutexLock& mutex_;
pthread_cond_t pcond_;
};
}
#endif








 本文深入解析muduo并发库中的Thread、Mutex和Condition类的实现细节,涵盖线程管理、互斥锁及条件变量的功能与应用。
本文深入解析muduo并发库中的Thread、Mutex和Condition类的实现细节,涵盖线程管理、互斥锁及条件变量的功能与应用。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











