



 文章详述了软体机器人在参数化建模、仿真分析、结构设计方面的研究,包括工作空间建模、多自由度机器人动力学分析、仿生运动建模以及软体机械臂的静力学和动力学建模。此外,还提到了实验制作方法和非均匀软体结构的变形建模,强调了这些知识对于机械、自动化和工程研究生的重要性,并鼓励进一步学习和创新。
文章详述了软体机器人在参数化建模、仿真分析、结构设计方面的研究,包括工作空间建模、多自由度机器人动力学分析、仿生运动建模以及软体机械臂的静力学和动力学建模。此外,还提到了实验制作方法和非均匀软体结构的变形建模,强调了这些知识对于机械、自动化和工程研究生的重要性,并鼓励进一步学习和创新。
软体机器人具有天然的柔性、自适应性、低成本和被动安全性,在人机交互、医疗服务等领域具有广泛的应用前景。同时,软体机器人的研究涉及软材料、机构设计、仿生学、微电子、控制和计算机科学等多个学科。
一、机器人参数化建模与仿真分析、优化设计
机器人工作空间(离散法、几何法)建模、工作空间CAD(SolidWorks)建模、 四自由度分拣机器人、3-dof 球面并联机构、MATLAB/Simulink运动学仿真、3T1R并联机械手运动学分析、非完全对称DELTA机器人、SolidWorks & Simscape联合仿真、平面两杆机械臂仿真(案例)、空间3平移1转动分拣机器人(案例)、 5自由度机械臂仿真(案例)、MATLAB/Workbench联合仿真、含子运动链机构刚度建模(案例)、非对称分拣机器人(案例)、动力学参数辨识、 3T1R分拣机器人迭代学习控制(案例)、MATLAB-Vrep(CoppeliaSim)可视化联合仿真
二、软体机器人结构设计与仿真分析
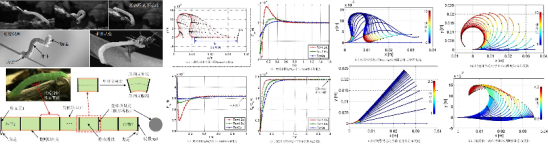
1、仿生对象的运动建模与仿真:仿尺蠖软体机器人研究与尺蠖身体运动建模的意义、尺蠖身体运动动力学建模与运动行为仿真(理论方法+模型推导)
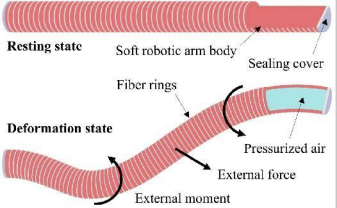
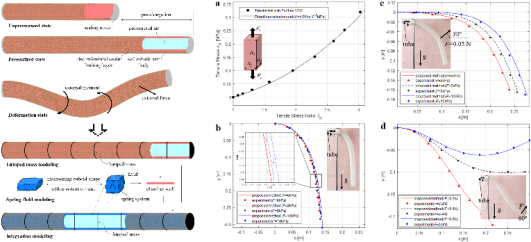
2、软体机械臂静力学建模:软体机械臂研究背景与意义、融合材料和几何非线性的软体机械臂静力学建模方法研究(理论方法+模型推导+matlab仿真)
3、软体结构在实验中制作的方法及技巧:柔性约束软体气动驱动器、软体机械臂的制作、颗粒阻塞/层阻塞(jamming)变刚度结构的制作、刚性约束刚软混合气动驱动器、仿尺蠖软体机器人的制作
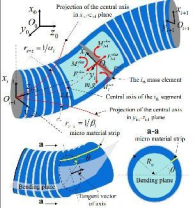
4、非均匀软体结构变形建模:一种新型柔顺线性驱动器的研究、关键功能部分力学建模(非均匀轴对称软体结构的力学建模+模型推导+matlab仿真)
5、软体机械臂动力学建模: 融合材料和几何非线性的软体机械臂动力学建模方法研究(理论方法+模型推导+matlab仿真)
6、方向创新点
------------------------------分--------------隔----------------号------------------------------------------
以上都是做为机械、自动化、特种材料、机器人与工程专业的研究生们必须掌握的知识点!请问你会多少,尤其第二个方向真的是比较考验我们的科研力、创新力、大家写论文是不是缺少“点子”?那么就该好好的多学点东西,抓耳挠腮是没用的哦,还是多做点有用功——譬如学学我们专业应该掌握的软件......
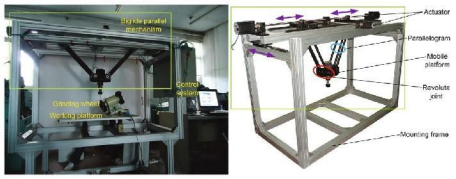
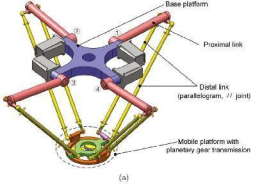
好啦,这里我放几张图,馋馋你的眼睛

编辑
添加图片注释,不超过 140 字(可选)

加油啦各位,我国软体机器人技术和产业取得源头创新成果还是得靠我们!这些方面可以去看一下相关的资料和讲解还是比较的清楚的 最后的最后,望各位学有所成~

















 421
421





 到【灌水乐园】发言
到【灌水乐园】发言







