



 本帖提供数学考试冲刺阶段的学习策略,包括重点题型解析、复习建议及心态调整。涵盖代数、级数、微分方程等核心内容,旨在帮助不同目标分数段的学生高效备考。
本帖提供数学考试冲刺阶段的学习策略,包括重点题型解析、复习建议及心态调整。涵盖代数、级数、微分方程等核心内容,旨在帮助不同目标分数段的学生高效备考。

先来回顾下前两天的题
前两天题没有做的同学一定要做完哦!
今天直接发三个题
(这种题是卷子中可能牵绊你的题,不过最多15分,无关大局,只是拦住想考满分的人,今天的这个帖子是让大家感受下,习惯下而已,不必在意)。
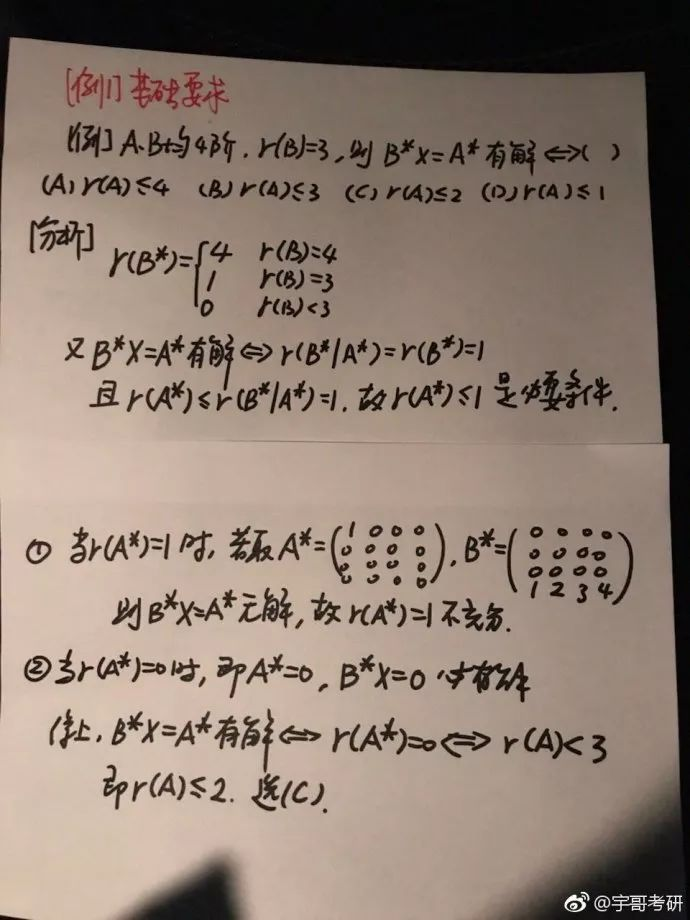
第一题(代数中的送命题)
伴随矩阵是重点,必考点,这是题源,答案解析完整全面,仔细体会这个逻辑,最后几天,多看看真题;
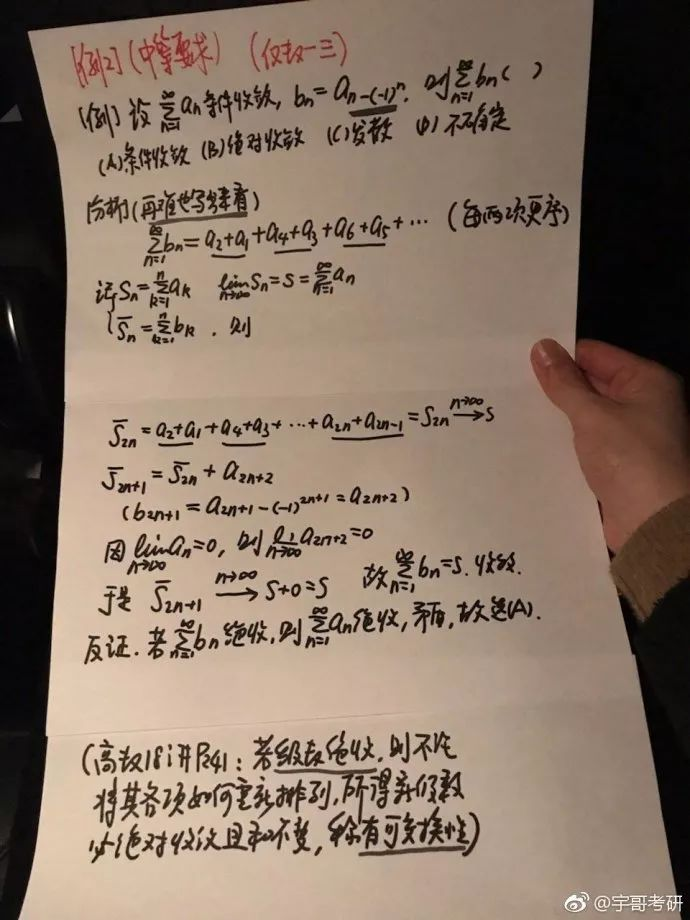
第二题(级数中的送命题)
(仅数学一三)级数判敛,通项表达式新颖一点,一定要写出来观察规律,是个区分度高的考点;
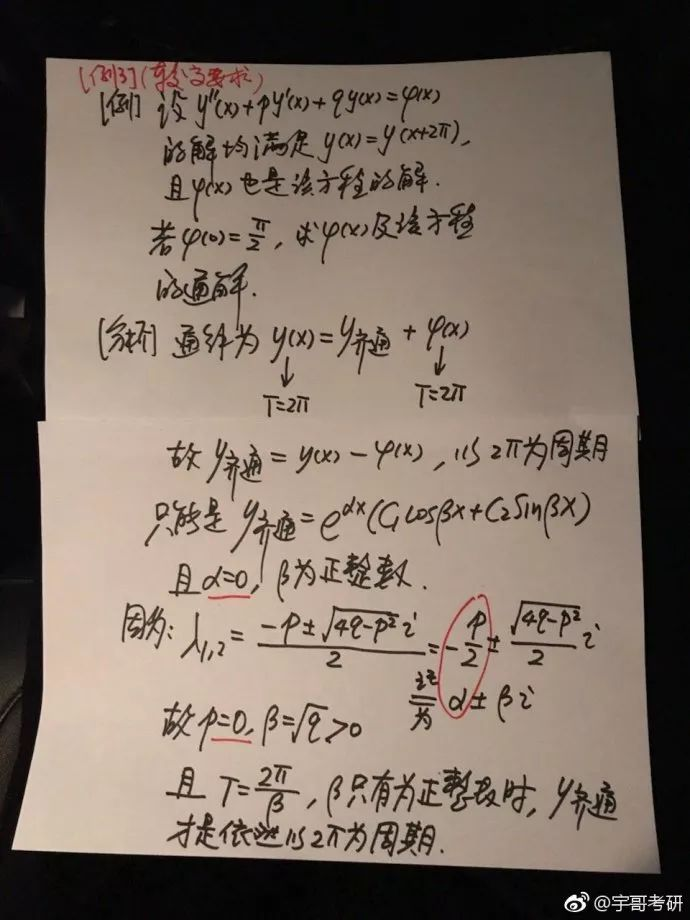
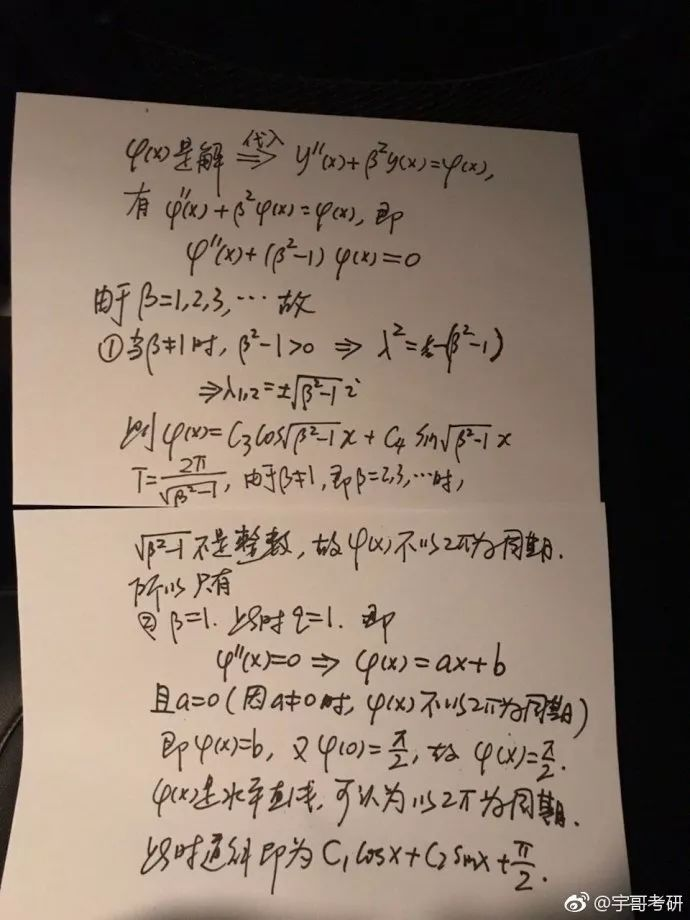
第三题(微分方程中的送命题)
微分方程解的周期性讨论,概念性强,有难度,p=0不难看出,后面的周期性是个区分度高的点,记住,以T为周期的周期函数,正整数倍的T依然是它的周期。
【数学保分建议】
目标90~100保底的
把10年真题大题好好算
目标110~130
把重点错题看一下,自己算错的,难算的亲自动手算
目标140~150
只有两个字祝福,
你已经不需要我的指点了,你有自己的套路
实在没有章法的同学
最后几天 回归基础
拿出近十年数学真题大全解
把所有代数大题反复抄写计算
把所有概统大题反复抄写计算
把所有高数中的基本计算大题反复抄写
让自己沉浸在常规真题的感受和状态中
考场上让常规题保住你的最低要求
有章法的同学请按你原计划进行
所有人 坚持看到、算到最后一刻
能做多少做多少
你就成功了
没问题的 加油


















 1131
1131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









