




 这篇博客探讨了C++中的单例模式实现,包括饿汉式和懒汉式的详细代码实现,并分析了它们的线程安全性和效率。同时,介绍了指令重排可能导致的单例陷阱,以及C++11通过静态内部变量解决这一问题的方法。文章最后提出,在C++11环境下,静态内部变量可以简化单例模式的实现并保证线程安全。
这篇博客探讨了C++中的单例模式实现,包括饿汉式和懒汉式的详细代码实现,并分析了它们的线程安全性和效率。同时,介绍了指令重排可能导致的单例陷阱,以及C++11通过静态内部变量解决这一问题的方法。文章最后提出,在C++11环境下,静态内部变量可以简化单例模式的实现并保证线程安全。
《每日一练》-实现一个单例模式
单例模式
23种设计模式与面向对象

单例模式
饿汉式
/*************************************************************************
> File Name: 1.singleton.cpp
> Mail: 1136984246@qq.com
************************************************************************/
// 单例模式四要素(a-b)
#include<iostream>
using namespace std;
// 饿汉
class Singleton {
public:
static Singleton* getInstance(); // 静态成员函数
private:
// 构造函数必须私有,外部不可调用构造函数 --(a)--
Singleton() {
cout << "new";
}
Singleton(const Singleton&)=delete; // ?拷贝构造函数
Singleton& operator=(const Singleton&)=delete; // ?赋值运算符?
static Singleton* instance; // 静态私有成员变量 (全局唯一性,保证线程安全) --(b)--
};
// 饿汉标志:1.无需使用的时候再new,不支持延时加载,但是线程安全(在线程未创建时完成静态成员的初始化),调用时getInstance直接return;
// 不支持延迟加载 --(c)-- :有问题早发现,假如单例创建时有问题(OOM,内存泄漏),在创建时就报错,而不是使用时才报错
Singleton* Singleton::instance = new Singleton();
// getInstance在线程安全的情况下要效率高 --(d)--
Singleton* Singleton::getInstance() {
return instance;
}
int main() {
Singleton *s = Singleton::getInstance();
Singleton *ss = Singleton::getInstance();
Singleton *sss = Singleton::getInstance();
return 0;
}
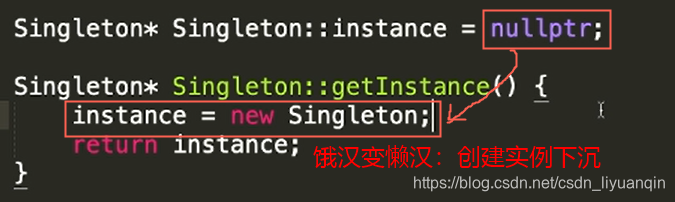
懒汉式
/*************************************************************************
> File Name: 2.singleton.cpp
> Mail: 1136984246@qq.com
************************************************************************/
#include<iostream>
#include <mutex>
using namespace std;
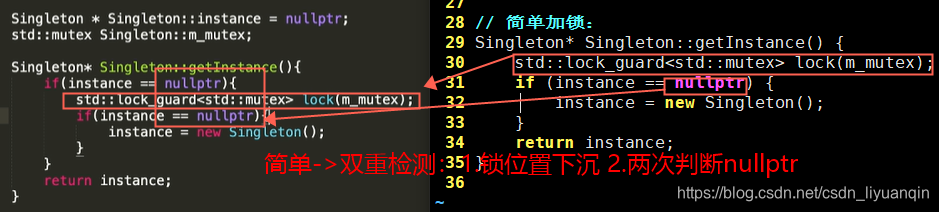
// 懒汉模式:简单加锁 -> 双重检测
class Singleton {
public:
static Singleton* getInstance();
private:
Singleton() {
cout << "new" << endl;
}
Singleton(const Singleton&)=delete;
Singleton& operator=(const Singleton)=delete;
static Singleton* instance;
static std::mutex m_mutex;
};
Singleton* Singleton::instance = nullptr; // ?
std::mutex Singleton::m_mutex;
// 双重检测
Singleton* Singleton::getInstance() {
if (instance == nullptr) {
std::lock_guard<std::mutex> lock(m_mutex); // ?
if (instance == nullptr) {
instance = new Singleton();
// 指令重排:有一定概率,与CPU有关 -> 解决方案 -> java中的jvm,c#的volunteer,windows的c++
// new非原子性操作 1.find找空间 2.alloc构造器 3.return (期待的方式)
// 实际上:X86的优化:由于alloc费时,而且return之后,不一定直接使用 -> 先return后alloc
}
}
return instance;
}
int main() {
Singleton *s = Singleton::getInstance();
Singleton *ss = Singleton::getInstance();
Singleton *sss = Singleton::getInstance();
return 0;
}
指令重排与单例陷阱
对于指令重排:假如有线程A,B,A拿到锁,B阻塞,当A进行new操作,先find,再return;进行return instance先释放锁,过一段时间period再alloc;在这段period中,B拿到锁,再次做了一遍new;
c++11的静态内部变量
公司中本质上是C++98,要不用饿汉模式,要不就是复杂原子操作的懒汉模式。有c++11,直接用静态内部变量就可以了。
/*************************************************************************
> File Name: 3.singleton.cpp
> Mail: 1136984246@qq.com
************************************************************************/
#include<iostream>
using namespace std;
// 静态内部变量
class Singleton {
public:
~Singleton() {
cout << "out" << endl;
}
static Singleton& getInstance() {
// 在内部new,实现了延迟加载
static Singleton instance; // c++11 static 线程安全
return instance;
}
private:
Singleton(const Singleton&)=delete;
Singleton& operator=(const Singleton&)=delete;
Singleton() {
cout << "new" << endl;
}
};
int main() {
Singleton &s = Singleton::getInstance();
Singleton &ss = Singleton::getInstance();
Singleton &sss = Singleton::getInstance();
return 0;
}

















 991
991

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









