




 这篇博客总结了Linux进程的优先级,包括用户态使用nice和chrt的参数范围,以及内核态的static_prio、rt_priority和normal_prio。讲解了这些优先级如何转换和影响进程调度,并提到top和ps显示优先级的不同方式。
这篇博客总结了Linux进程的优先级,包括用户态使用nice和chrt的参数范围,以及内核态的static_prio、rt_priority和normal_prio。讲解了这些优先级如何转换和影响进程调度,并提到top和ps显示优先级的不同方式。
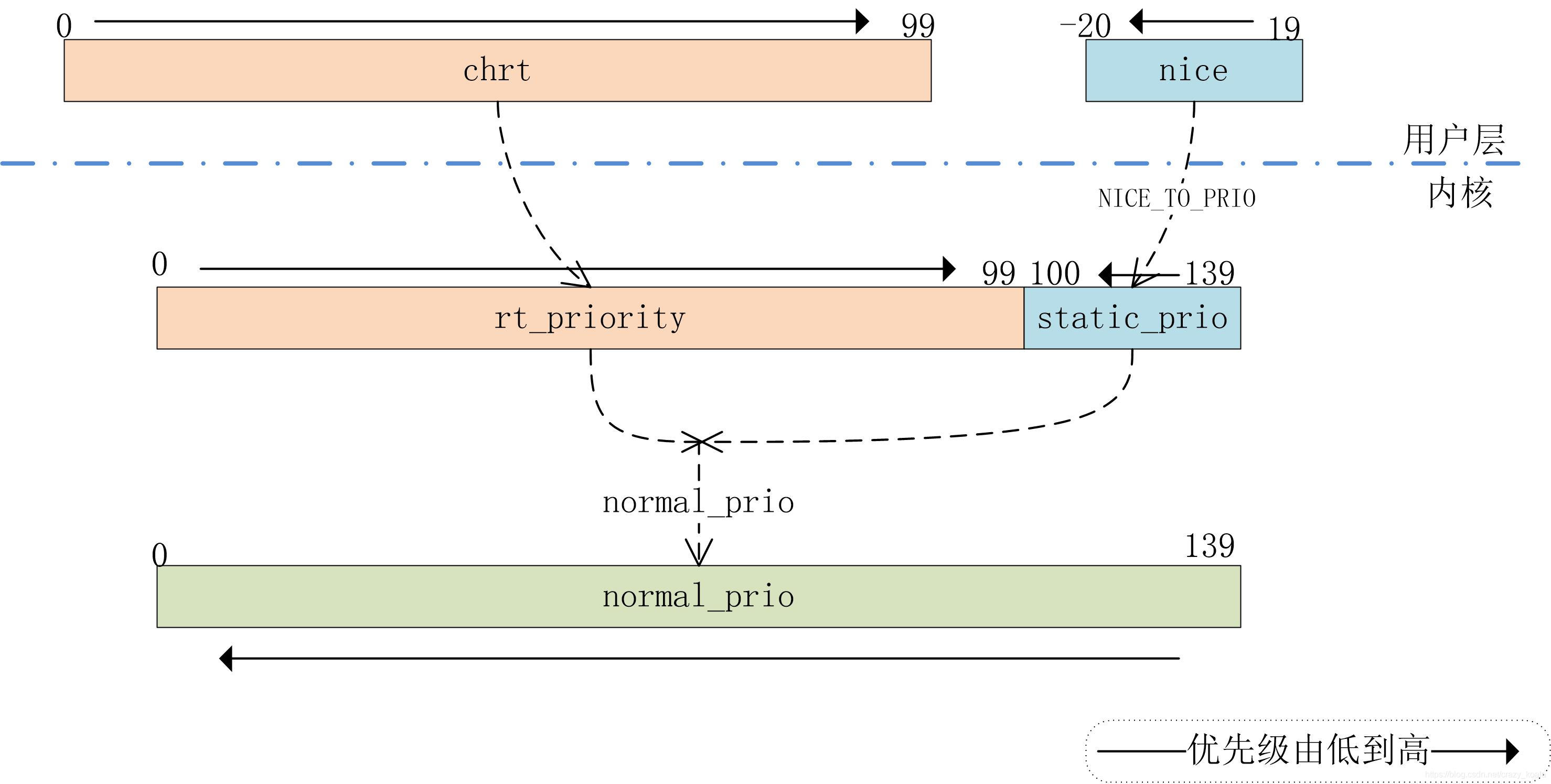
linux的优先级表示很叫人头大,所有就总结了一张图:
再看看代码,文件prio.h的一些宏:
#define MAX_NICE 19
#define MIN_NICE -20
#define NICE_WIDTH (MAX_NICE - MIN_NICE + 1) //nice优先级max和min的跨度是40
#define MAX_USER_RT_PRIO 100
#define MAX_RT_PRIO MAX_USER_RT_PRIO //100
#define MAX_PRIO (MAX_RT_PRIO + NICE_WIDTH) //优先级数值最大是140
#define DEFAULT_PRIO (MAX_RT_PRIO + NICE_WIDTH / 2) //默认优先级是120
#define NICE_TO_PRIO(nice) ((nice) + DEFAULT_PRIO) //nice的参数转成内核记录的优先级nice(~20 - 19) --> (100 ~ 139)
#define PRIO_TO_NICE(prio) ((prio) - DEFAULT_PRIO) //NICE_TO_PRIO的反向操作
#define USER_PRIO(p) ((p)-MAX_RT_PRIO) //(0 ~ 139) --> (-100 ~ 39)
#define TASK_USER_PRIO(p) USER_PRIO((p)->static_prio) //(100 ~ 139) --> (0 ~ 39)
#define MAX_USER_PRIO (USER_PRIO(MAX_PRIO)) //0
再看一眼“万物之始”init_task:
#define INIT_TASK(tsk) \
{ \
... \
.prio = MAX_PRIO-20, \
.static_prio = MAX_PRIO-20, \
.normal_prio = MAX_PRIO-20,
...
}
通过阅读上面代码,大概总结下:
用户态:
1.用户使用nice的参数范围:(-20 ~ 19) (高 -> 低)
2.用户使用chrt的参数范围:( 0 ~ 99) (低 -> 高)
-------------------------------------------
内核态:
1.static_prio 表示普通优先级,通过NICE_TO_PRIO将nice值转换至(100 ~ 139)(高 -> 低)
2.rt_priority 表示实时优先级,直接使用chrt设置的值(0~99)(低 -> 高)
3.normal_prio 表示归一化的优先级,将上面两个优先级归一到(0~139)优先级从高到低
static inline int normal_prio(struct task_struct *p)
{
int prio;
if (task_has_dl_policy(p))
prio = MAX_DL_PRIO-1;
else if (task_has_rt_policy(p))
prio = MAX_RT_PRIO-1 - p->rt_priority;
else
prio = p->static_prio; //inline __normal_prio(p)
return prio;
}
rt(0~99) or command(100~139)(高 -> 低)
4.prio 表示调度器实际使用的优先级,在进程创建,进程唤醒时,已经解决PI问题时,都会调用effective_prio来调整进程优先级:
static int effective_prio(struct task_struct *p)
{
p->normal_prio = normal_prio(p); /*
* If we are RT tasks or we were boosted to RT priority,
* keep the priority unchanged. Otherwise, update priority
* to the normal priority:
*/
if (!rt_prio(p->prio))
return p->normal_prio;
return p->prio;
}
其实top和ps表现优先级的方式又有不同,总的来说都是以数值越小优先级越高的形式体现的。

















 1万+
1万+




 到【灌水乐园】发言
到【灌水乐园】发言







