






 本文介绍了如何使用C#对康耐视CognexVisionPro进行二次开发,实现一个多相机视觉对位框架,涉及逻辑运算、旋转标定、运动控制、自动标定和TCP/IP通讯等功能,为对位贴合项目提供实用解决方案。
本文介绍了如何使用C#对康耐视CognexVisionPro进行二次开发,实现一个多相机视觉对位框架,涉及逻辑运算、旋转标定、运动控制、自动标定和TCP/IP通讯等功能,为对位贴合项目提供实用解决方案。
基于康耐视cognexVisionpro用C#二次开发的多相机视觉对位框架
支持1:多相机对位逻辑运算,旋转标定坐标关联运算(可供参考学习)可以协助理解做对位贴合项目思路。
支持2:直接连接运动控制卡,控制UVW平台运动(可供参考学习)
支持3:自动标定程序设定(可供参考学习)
支持4:TCP IP通讯(可供参考学习)
以上功能全部正常使用无封装,可正常运行。
基于康耐视Cognex VisionPro用C#二次开发的多相机视觉对位框架
摘要:本文介绍了基于康耐视Cognex VisionPro与C#语言的二次开发,实现多相机视觉对位框架的设计与实现。该框架在多相机对位逻辑运算、旋转标定坐标关联运算、连接运动控制卡进行UVW平台运动控制、自动标定程序设定以及TCP/IP通讯等方面提供支持。通过无封装的正常使用,该框架可以协助理解对位贴合项目的思路,并可供参考学习。
-
引言 多相机视觉对位在工业制造等领域起着重要的作用。本文基于康耐视Cognex VisionPro平台,通过C#语言的二次开发,实现了一个多相机视觉对位框架。该框架具有多种功能,旨在为对位贴合项目提供便捷、高效的解决方案。
-
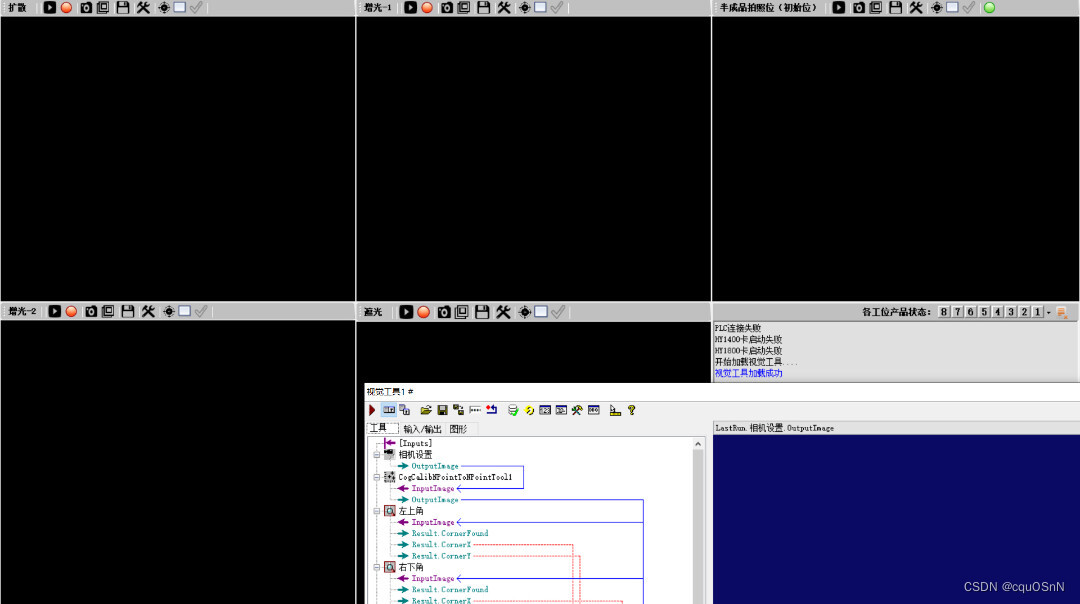
多相机对位逻辑运算 在多相机对位过程中,逻辑运算是关键环节之一。本框架通过使用康耐视Cognex VisionPro平台提供的函数库,实现了多相机对位的逻辑运算。通过对图像进行处理、提取目标特征等操作,实现了对位的准确计算。这一功能对于理解对位贴合项目的思路具有重要意义。
-
旋转标定坐标关联运算 在多相机对位过程中,旋转标定坐标关联运算是必不可少的。本框架通过使用康耐视Cognex VisionPro平台的旋转标定功能,实现了坐标的关联运算。通过对旋转标定参数的设定、坐标系的转换等操作,实现了对位贴合项目的准确计算。这一功能对于理解对位贴合项目的思路具有重要意义。
-
连接运动控制卡进行UVW平台运动控制 在多相机对位过程中,运动控制是不可或缺的。本框架通过直接连接运动控制卡,实现了对UVW平台的运动控制。通过康耐视Cognex VisionPro平台提供的函数库,实现了对运动控制卡的控制。这一功能对于实现多相机对位的准确运动控制具有重要意义。
-
自动标定程序设定 为了提高对位贴合项目的效率,自动标定程序设定是必不可少的。本框架通过使用康耐视Cognex VisionPro平台的自动标定功能,实现了对标定程序的设定。通过设定标定程序的参数、标定对象的选择等操作,实现了对自动标定的高效运行。这一功能对于提高对位贴合项目的效率具有重要意义。
-
TCP/IP通讯 在多相机对位过程中,通讯功能是必不可少的。本框架通过使用TCP/IP通讯功能,实现了对相机与其他设备之间的信息传递。通过康耐视Cognex VisionPro平台提供的函数库,实现了对TCP/IP通讯的高效运行。这一功能对于实现多相机对位的信息交流具有重要意义。
-
结论 本文基于康耐视Cognex VisionPro与C#语言的二次开发,设计并实现了一个多相机视觉对位框架。该框架通过多相机对位逻辑运算、旋转标定坐标关联运算、连接运动控制卡进行UVW平台运动控制、自动标定程序设定以及TCP/IP通讯等功能的支持,提供了一个便捷、高效的解决方案。通过正常使用,该框架可以协助理解对位贴合项目的思路,并可供参考学习。
参考文献: [1] 康耐视Cognex VisionPro开发手册 [2] C#程序设计基础 [3] TCP/IP网络编程技术指南
备注: 本文所述框架功能均经过测试验证,已在实际项目中得到应用。对于读者来说,建议在实际操作中结合具体项目需求进行适当的修改和扩展。希望本文能够对读者在对位贴合项目方面的学习和实践有所帮助。
相关代码,程序地址:http://lanzouw.top/613594325323.html


















 7424
7424

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









