



1.测试用例编写方式:
| 等价类划分 | 边界值分析法 |
|---|---|
| 场景法 | 错误推测(反推法) |
| 正交表法 | 因果图法 |
| 判断表法 |
2. 测试用例
是为某个业务目标,而编制的一组由测试输入,执行条件以及预期结果组成的案例
作用:
在开始实施测试之前设计好测试用例,可以避免盲目测试并提高测试效率。
测试用例的使用令软件测试的实施重点突出、目的明确。
在软件版本更新后只需修正少部分的测试用例便可展开测试工作,降低工作强度、缩短项目 周期。
检验软件是否满足客户需求、体现一个测试人员的工作量、展现测试用例的设计思路
特征:
代表性:能够代表并覆盖各种合理的和不合理、合法的和不合法的、边界的和越界的以及极限 的输入数据、操作等。
针对性:对程序中的可能存在的错误有针对性地测试
可判定性:测试执行结果的正确性是可判定的,每一个测试用例都应有相应的期望结果
可重现性:对同样的测试用例,系统的执行结果应当是相同的
用例模板:
用例编号、测试模块、用例标题、用例级别、前置条件、测试输入、执行操作、预期结果,
实际结果
3.等价类划分
等价类划分法是将所有程序的输入域划分成若干个子集合(等价类),然后从每一个子集合中选 取少数具有代表性的数据作为测试的输入数据
在该子集合中,所有的输入数据对于揭露软件中的错误都是等效的
等价类划分有效等价类(正面,不会报错)和无效等价类(负面,抛出错误)
场景:当测试需要数据量过大,且数据操作可以分类时进行等价类划分
4.边界值分析法
定义:边界值分析法是对等价类划分法的一个补充,边界值一般都是从等价类的边缘值去寻找
作用:人们长期的测试工作经验得知,大量的错误是发生在输入或者输出范围的边界上,而不是在输入范围的内部。因此针对各种边界情况设计测试用例,可以查询更多的错误---提出更多的bug
场景:如果需求规定范围或者规定了取值的个数时,可利用边界值进行测试
5.场景法
通过场景描述的业务流程(业务逻辑),也包括代码实现逻辑,设计用例来遍历场景,验证软件系统功能的正确性
6.错误推测法(反推法)
根据经验或直觉推测程序中可能存在的各种错误,从而有针对性地编写检查这些错误的测试用例的黑盒测试方法。
它的要素有三个:经验,知识,直觉---探索性测试
考虑程序可能触发的错误场景---不能正常运行
总结:
场景法---业务流程梳理,核心业务逻辑场景;
等价类和边界值---细化分析;
错误推测法对最终用例进行错误场景下的补充;
7.正交表法
正交表能够在因素变化范围内均衡抽样,使每次试验都具有较强的代表性,由于正交表具备均衡分散的特点,保证了全面实验的某些要求,这些试验往往能够较好或更好的达到实验的目的。
场景:在一个界面中有多个控件,每个控件有多个取值,控件之间可以相互组合
8.因果图法
因果图法比较适合输条件比较多的情况,测试所有的输入条件的排列组合。所谓的原因就是输入,所谓的结果就是输出。
1)因果图基本图形符号
恒等:若原因出现,则结果出现;若原因不出现,则结果不出现。
非(~):若原因出现,则结果不出现;若原因不出现,则结果出现。
或(∨):若几个原因中有一个出现,则结果出现;若几个原因都不出现,则结果不出现。
与(∧):若几个原因都出现,结果才出现;若其中有一个原因不出现,则结果不出现。
2) 因果图的约束符号
E(互斥):表示两个原因不会同时成立,两个中最多有一个可能成立
I(包含):表示三个原因中至少有一个必须成立
O(惟一):表示两个原因中必须有一个,且仅有一个成立
R(要求):表示两个原因,a出现时,b也必须出现,a出现时,b不可能不出现
M(屏蔽):两个结果,a为1时,b必须是0,当a为0时,b值不定
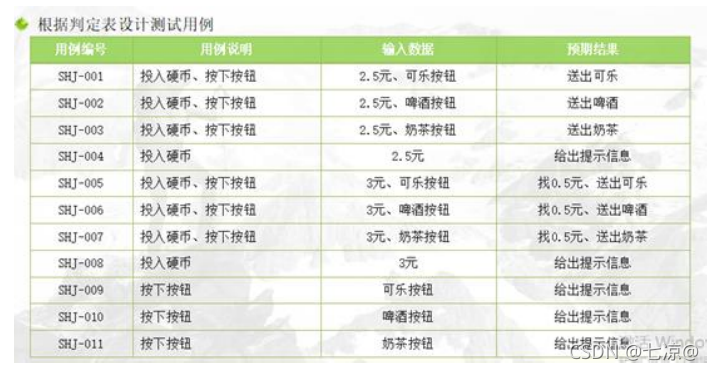
9.判定表法


















 831
831

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









