







 超级会员免费看
超级会员免费看
DROID-SLAM
- 35th Conference on Neural Information Processing Systems (NeurIPS 2021).
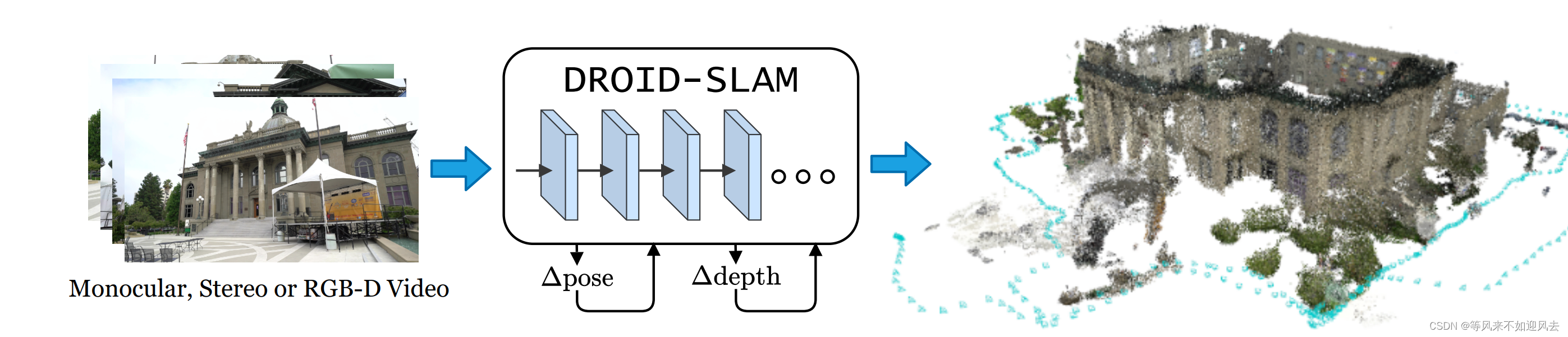
- DROID-SLAM can operate on monocular, stereo, and RGB-D video. It builds a dense 3D
map of the environment while simultaneously localizing the camera within the map. - DROID-SLAM 可以处理单眼、立体声和 RGB-D 视频。它构建了环境的密集 3D 地图,同时在地图中定位相机。
“SLAM” 是一个缩写,代表 Simultaneous Localization and Mapping,即同时定位与地图构建。让我为您详细解释一下:
-
定位 (Localization):这是指在未知环境中,通过传感器数据(例如相机、激光雷达等)来确定机器人自身的位置。定位的目标是估计机器人相对于某个参考坐标系的位置和姿态。
-
地图构建

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











