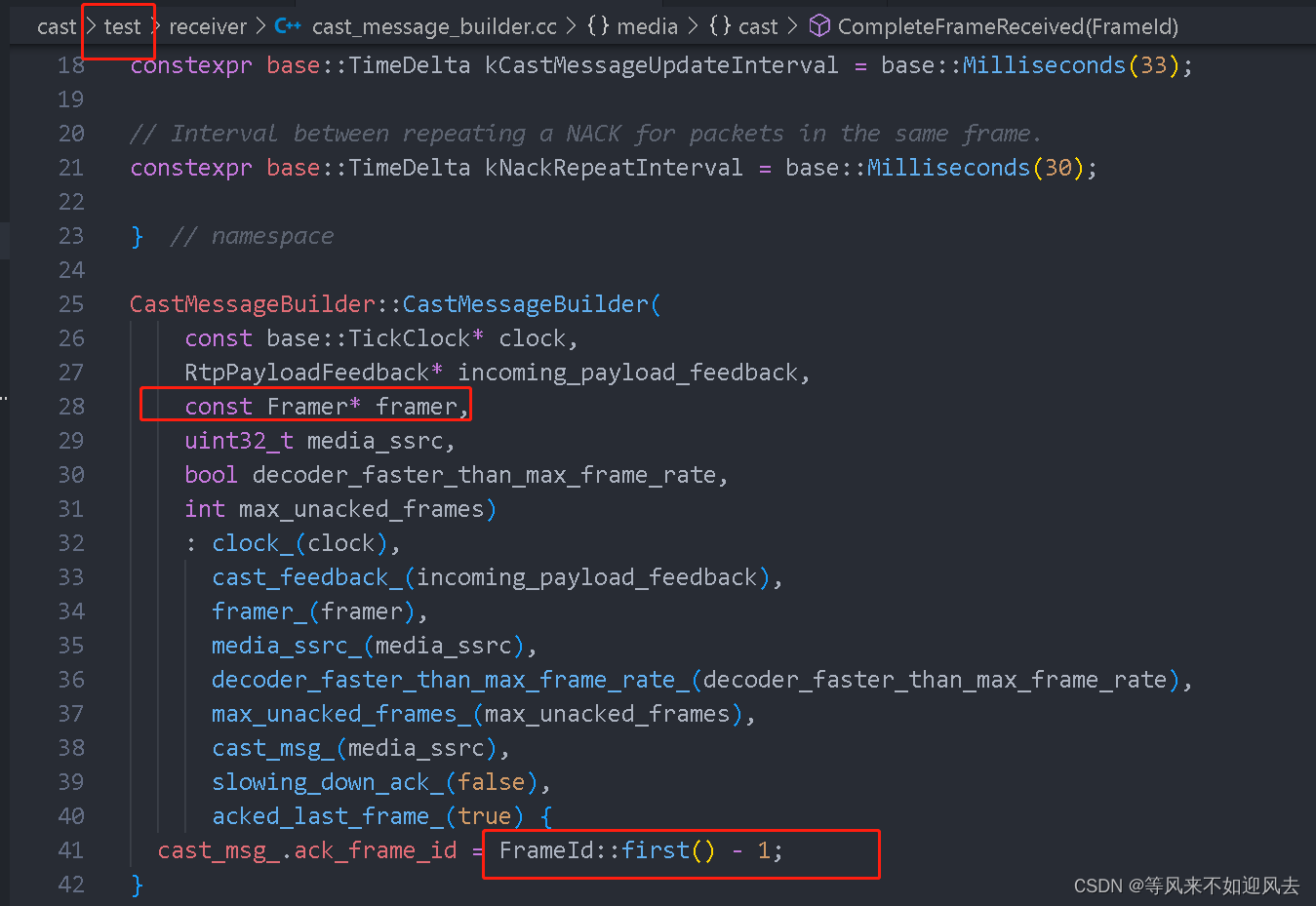
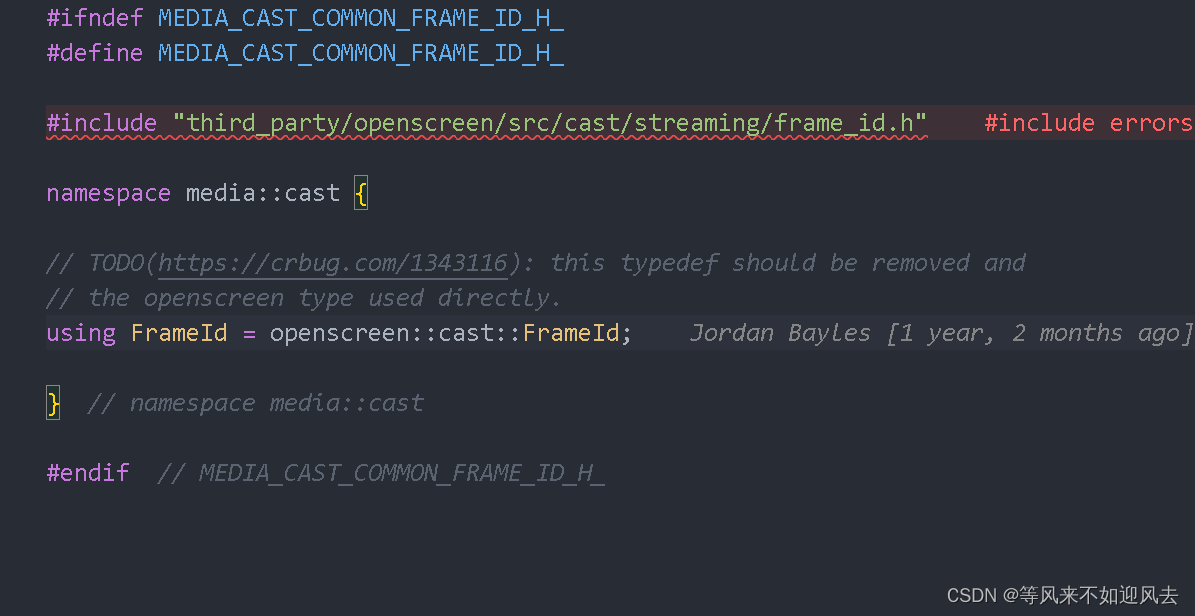
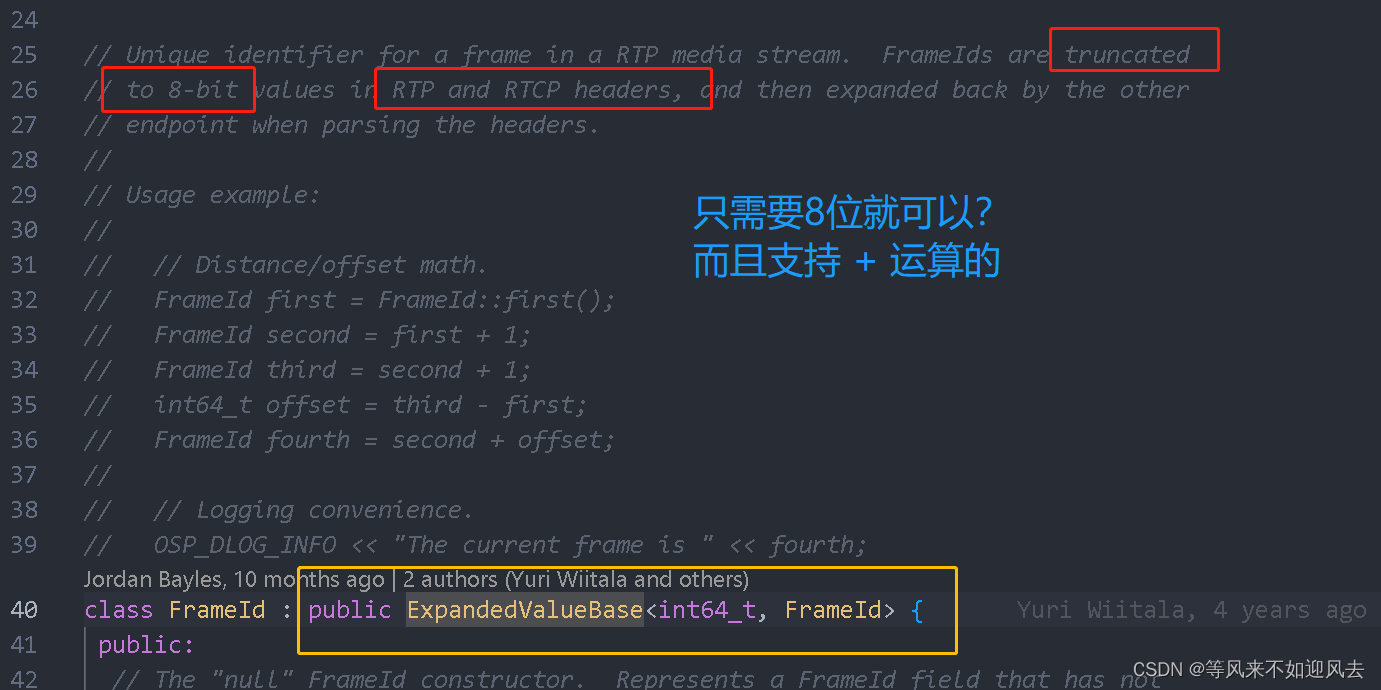
当前同步的最新版 测试代码中用到了FrameId类 Frameid E:\chromium\src\media\cast\common\frame_id.h 属于第三方库:openscreen E:\chromium\src\third_party\openscreen\src\cast\streaming\frame_id.h 为啥我感觉是int64的?








 本文探讨了在测试代码中遇到的openscreen库的FrameId类,详细介绍了其位于E:chromiumsrc hird_partyopenscreensrccaststreamingframe_id.h。作者对FrameId可能是int64类型的原因进行了猜测,并提到它支持加法和左移操作。
本文探讨了在测试代码中遇到的openscreen库的FrameId类,详细介绍了其位于E:chromiumsrc hird_partyopenscreensrccaststreamingframe_id.h。作者对FrameId可能是int64类型的原因进行了猜测,并提到它支持加法和左移操作。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 870
870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








