



你好,我是坚持分享干货的 EarlGrey,翻译出版过《Python编程无师自通》、《Python并行计算手册》等技术书籍。
如果我的分享对你有帮助,请关注我,一起向上进击。
4 月 15 日,新加坡总理公署发表声明宣布,总理李显龙将于 5 月 15 日辞职,并正式交棒给副总理兼财政部长黄循财。
对于李氏家族下一代是否会继续活跃在新加坡政坛,目前外界说法不一。
但在开源圈里,李氏家族绝对有一席之地。
李显龙有 4 名子女,其本人、次子,以及幼子都有非常专业的计算机技术背景。
下面我们一起来看看这一家子 “开源” 名门望族。
省流总结:
- 李显龙,新加坡第三任总理,剑桥大学数学一级荣誉学位和计算机优等文凭,曾开源用 C++ 写的数独求解器
- 李鸿毅,男,1987 年出生,新加坡第三任总理李显龙次子,新加坡政府开源科技部 (Open Government Products) 主管
- 李浩毅,男,1989 年出生,新加坡第三任总理李显龙幼子,毕业于 MIT,计算机科学和工程学位,Scala 社区的主要贡献者
李显龙,新加坡第三任总理,英国剑桥大学数学一级荣誉学位和计算机优等文凭。
2015 年 5 月,李显龙曾经在一次创业者论坛上透露,他最后编写的程序是一个解决数独问题的程序。当时他还提到自己的孩子都是学 IT 的,有两个都毕业于麻省理工学院。其中一个儿子还曾经给过他一本 Haskell 语言的书,李显龙表示计划退休后开始学习……
那次演讲结束后,很多人要求李显龙公开那段代码。于是他在自己的 Facebook 账号上发布了一张截图,并提供了一个指向 Google Drive 的链接,里面包含了这段代码及其输出示例,以及编译后的 Windows 可执行文件。
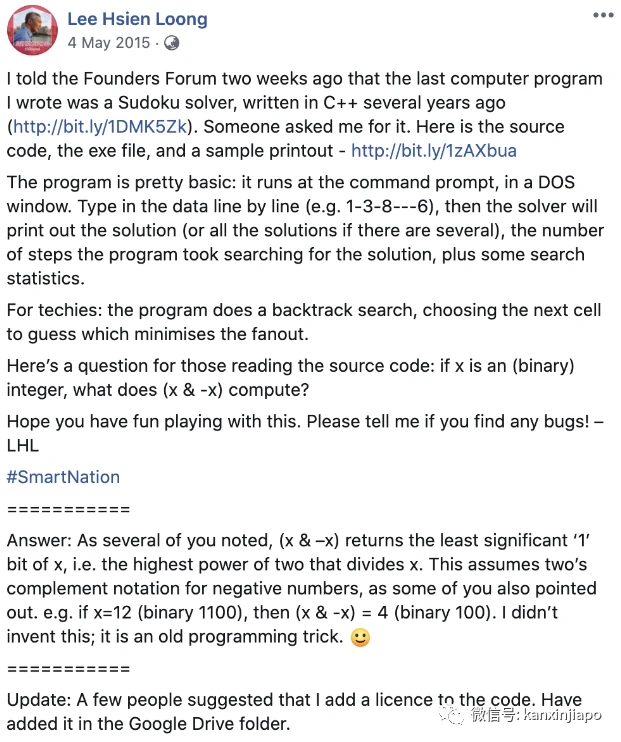
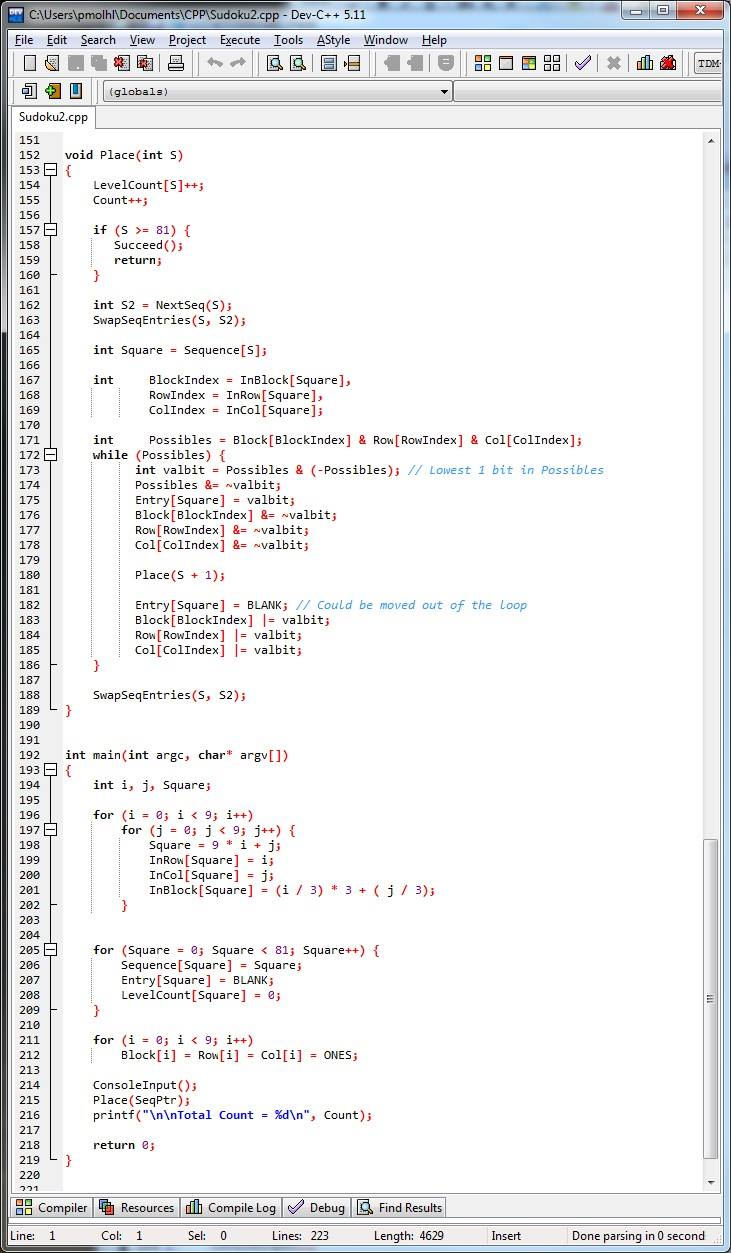
尽管李显龙在那个 Facebook 贴子里自谦道,这个用 C++ 编写的数独求解器是几年前的作品了,现在有点过时了 —— 但这组代码仍然引起全球网络用户,特别是程序员的热议与赞赏。
Facebook(现 Meta)CEO 马克・扎克伯格在会见李显龙时称他是少数会写代码的领导人,并向他赠送了一件特别礼物 —— 由李显龙编写的代码蚀刻在上的艺术纪念品。

李鸿毅是李显龙次子,1987 年出生,曾赴美国麻省理工学院攻读经济学,之后在谷歌工作过两年,于 2013 年加入政府科技局。目前担任新加坡政府开源科技部 (Open Government Products) 主管。
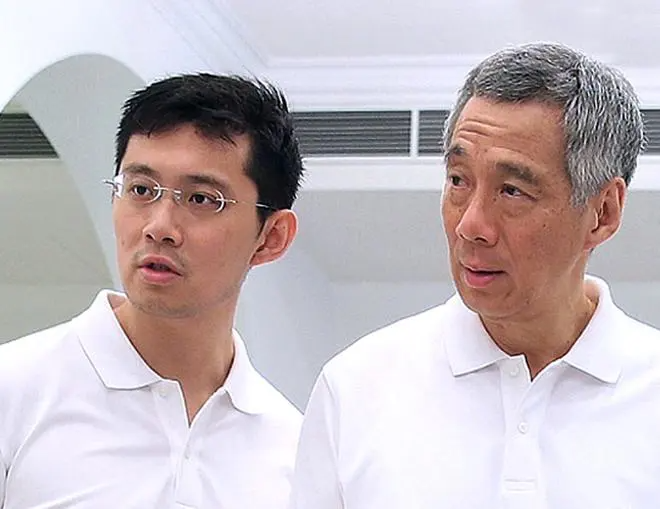
李鸿毅和父亲李显龙,图源:The Independent Singapore
在政府部门任职期间,李鸿毅和他的团队对于推动新加坡数字化进程做出了卓越贡献。
李鸿毅曾说过,谷歌和 Facebook 有不少能干的产品经理,相较之下,政府虽然不缺人才,但想要研发科技产品的人却不多。因此他目前最想解决的问题,就是要找到优秀的人,为公共服务的一些重要问题找出解决方案。
他还在采访中提到,新加坡能提升并做得更好的唯一途径,是大力发展科技和技术。
如果说前面两位还称不上是真正的 “技术流” 硬核开源开发者,请继续往下看。
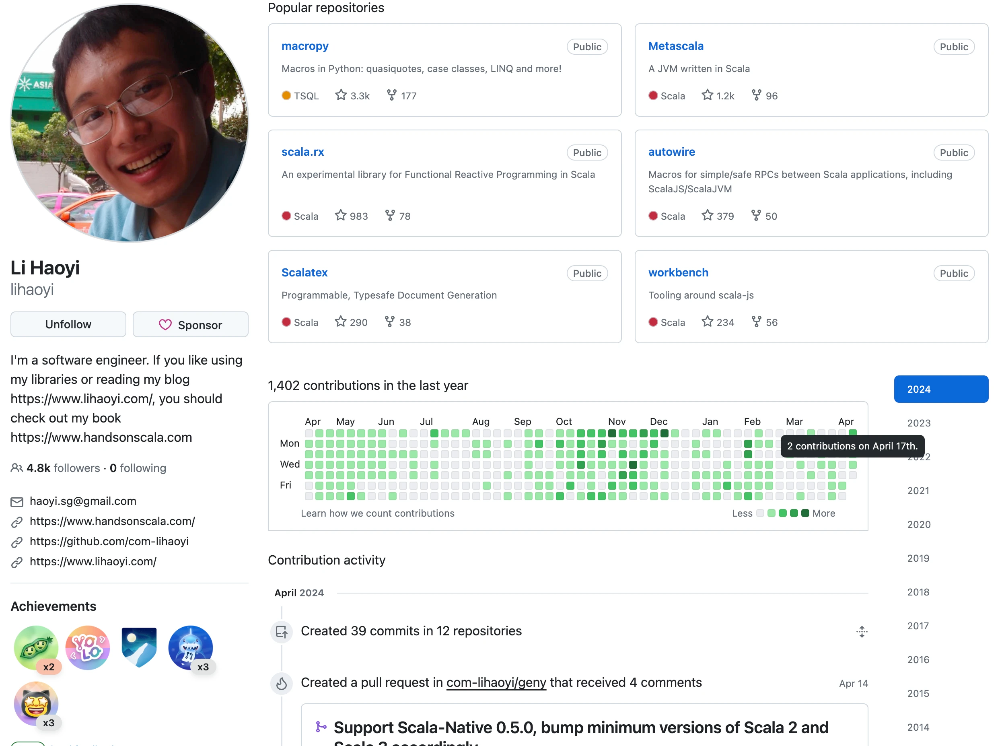
李浩毅是李显龙最小的儿子(1989 年出生),但在网络上,他以《Hands-on Scala Programming》(中文译名:《动手学 Scala 编程》)的作者身份更为人所知。
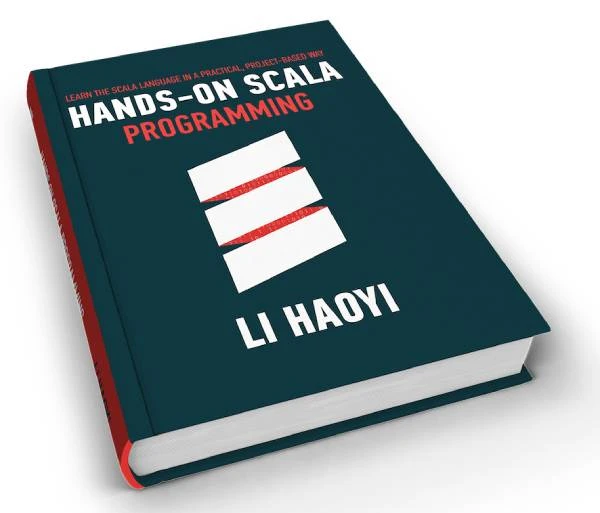
李浩毅毕业于麻省理工学院,拥有计算机科学和工程学位。根据其个人网站的介绍,他是 Scala 社区核心贡献者,他的开源项目在 GitHub 上有超过 10,000 Star,每个月的下载次数超过 7,000,000 次。

作为一名 Scala 工程师,李浩毅在构建分布式后端系统、编程语言、高性能 Web 应用方面,都具备非常高的水平。
从他的 GitHub 主页 (https://github.com/lihaoyi) 可以看到,昨天他还在提交 commit,主要是在优化 Scala-Native。
最后问题来了,我现在去学 Scala,参与到社区里,那我岂不是有机会可以勾搭上那谁?
References
https://drive.google.com/folderview?id=0B2G2LjIu7WbdfjhaUmVzc1lCR2hUdk5fZllCOHdtbFItbU5qYzdqZGVxdmlnRkJyYVQ4VU0
https://www.facebook.com/leehsienloong/photos/a.344710778924968.83425.125845680811480/905828379479869/
https://www.lihaoyi.com/
来源:OSC开源社区
- EOF -
文章已经看到这了,别忘了在右下角点个“赞”和“在看”鼓励哦~
推荐阅读 点击标题可跳转
回复下方「关键词」,获取优质资源
回复关键词「 pybook03」,领取进击的Grey与小伙伴一起翻译的《Think Python 2e》电子版
回复关键词「书单02」,领取进击的Grey整理的 10 本 Python 入门书的电子版
👇关注我的公众号👇
告诉你更多细节干货

欢迎围观我的朋友圈
👆每天更新所想所悟

















 2195
2195

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









