



 文章讲述了程序员在追求项目进度和市场需求时,往往牺牲代码质量。主角张大胖对此有深刻认识,他的新书《码农翻身2》提倡通过故事化教学揭示技术本质。
文章讲述了程序员在追求项目进度和市场需求时,往往牺牲代码质量。主角张大胖对此有深刻认识,他的新书《码农翻身2》提倡通过故事化教学揭示技术本质。


所以,当程序员遇到可以重构的地方,总是禁不住时间进度的压力,用捷径来解决问题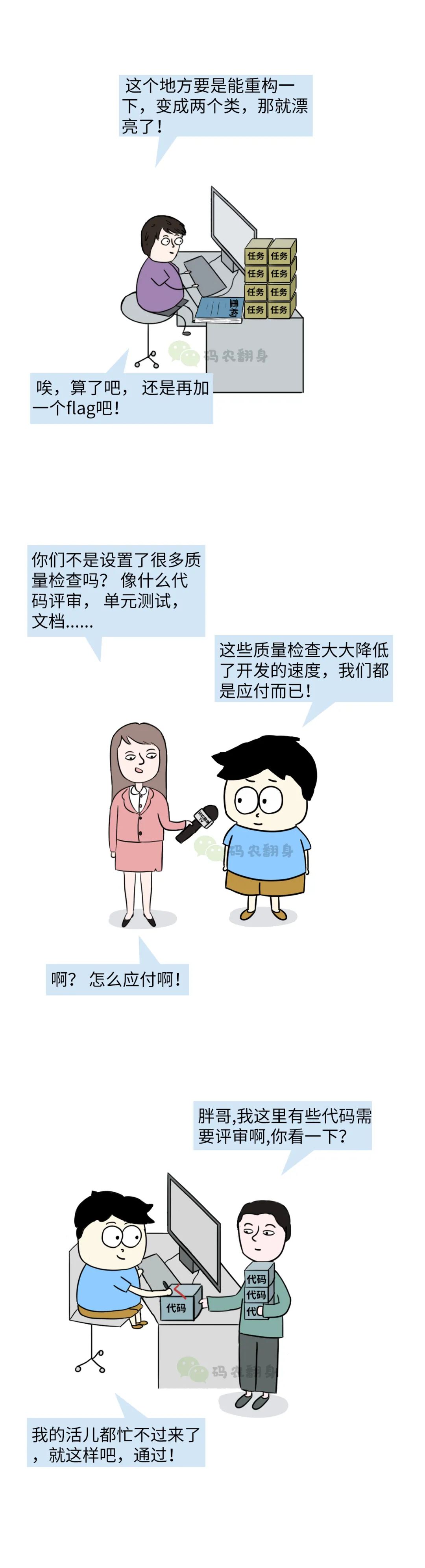
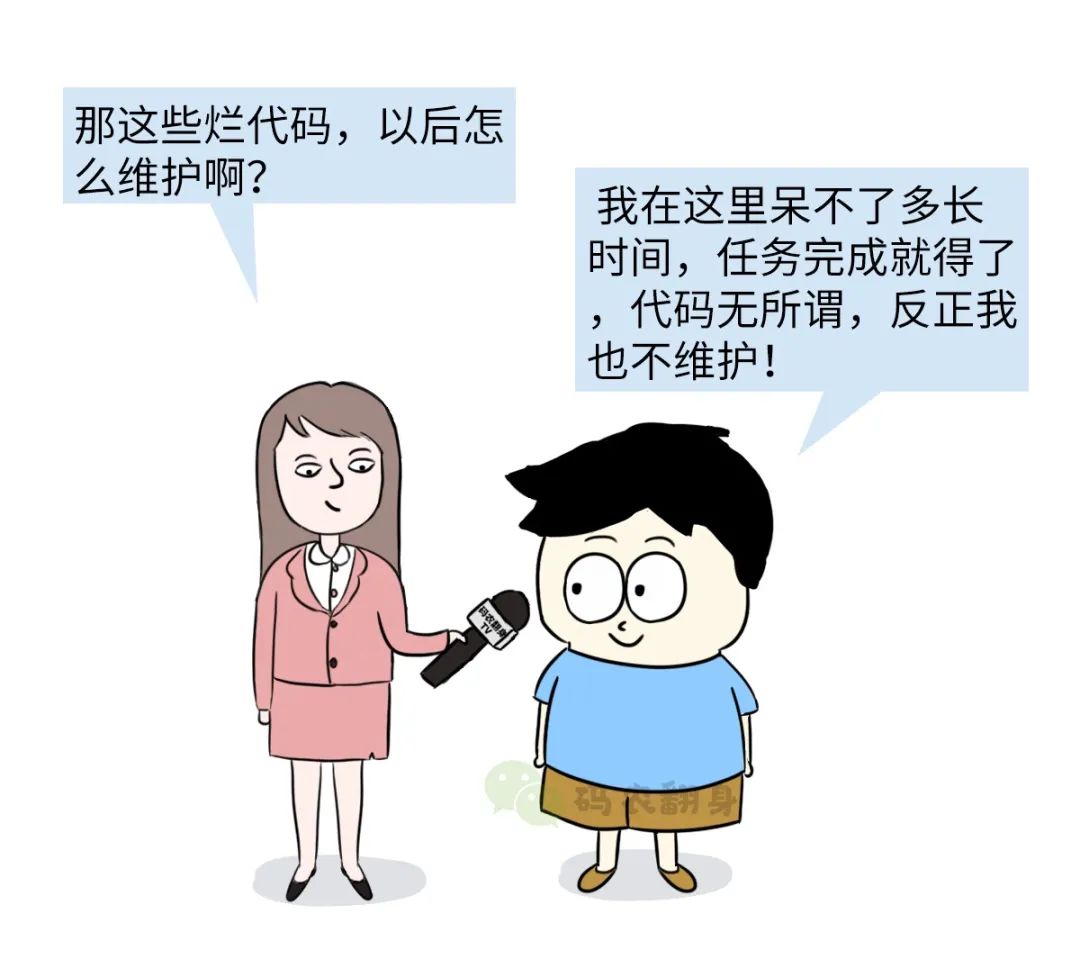
聪明的张大胖已经看透了这个行业运作的“奥秘”。
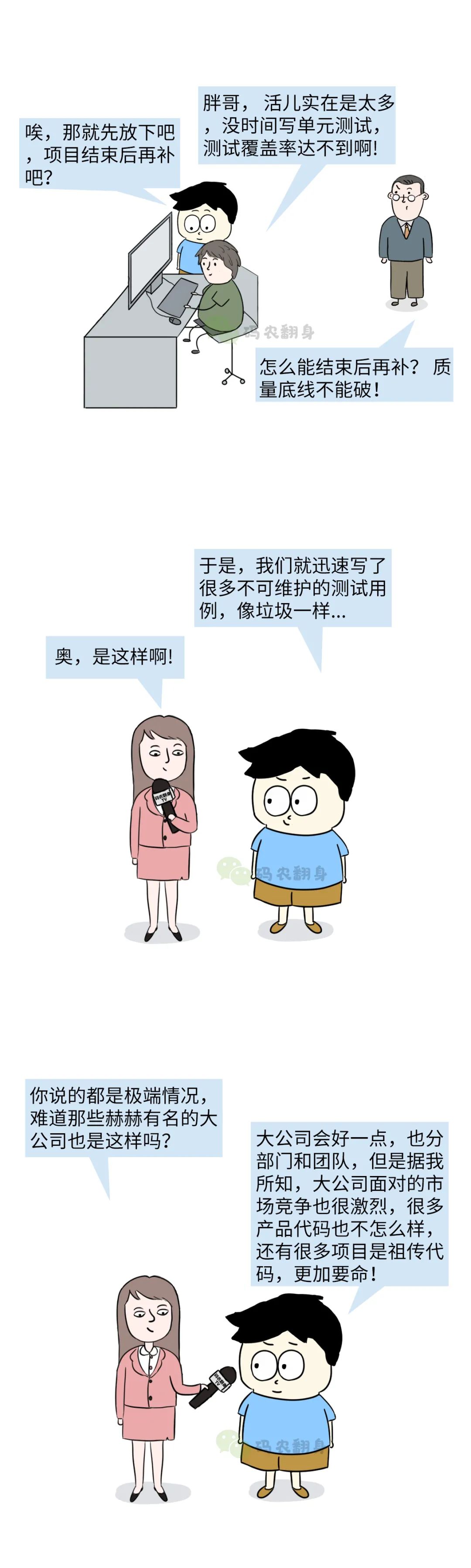
公司领导从上到下,虽然口号喊得震天响,但没有人真心实意地关心代码质量。
对于客户项目,他们的眼睛都盯着能不能按期完工(不管需求有多少),客户满意度,能不能快速回款;
对于互联网产品,他们关注的是市场占有率,竞争对手又推出了那些新功能,我们能不能跟进......
迅速把功能推向市场,获得用户才是第一位目标。
代码质量嘛,也要强调一下,但是执行到什么样子就顾不上了。
上有政策,下有对策,质量检查形同虚设,时间久了,代码一定会变成屎山的。
不过,张大胖并不担心,因为他知道:在一个地方挖了坑以后,一定要及时跳出来,一定要选准跑路的时间......
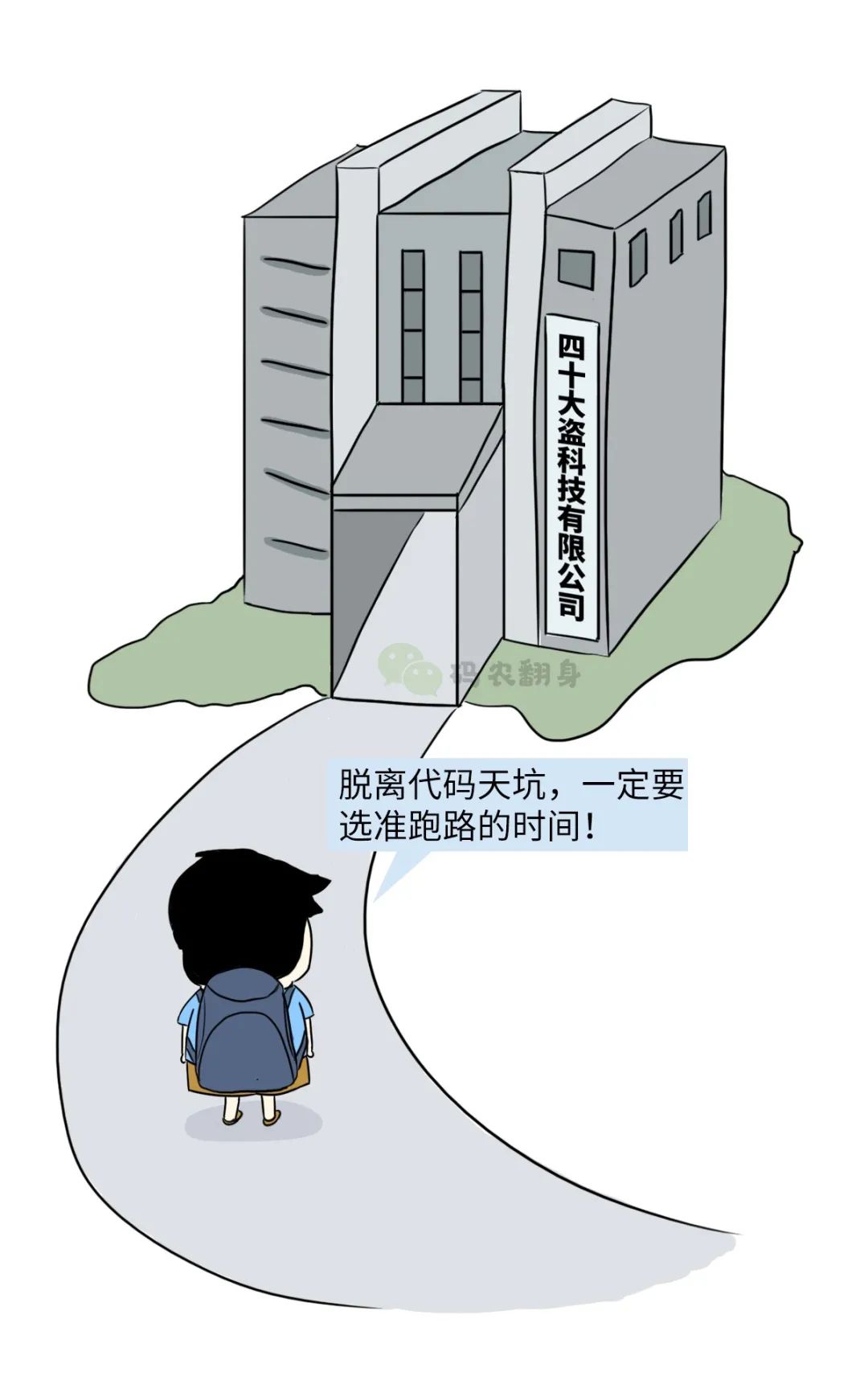
脱离了天坑的张大胖兴奋地打开了新公司代码库,定睛一看,他立刻傻眼了......

我的新书《码农翻身2》近期正式出版,这本书开启了5折优惠,全彩印刷,用故事给技术加点料,原价118元,现在仅需59元。
《码农翻身》1和2 是我一二十年经验的总结,现在只要花几十块就可以买到一二十年积累的精华,很划算啊!
这本书有两大特色:
1. 用故事讲解技术,好玩有趣
从封面的两幅漫画就能看出来,一幅是Java派人到Python王国进行渗透,被抓起来了。一幅是一队JavaScript士兵,张牙舞爪地对后端王国进攻。
书中每一篇都是一个独立的小故事,读起来毫无负担,可以放在床头,当做睡前故事,不知不觉间就把技术给掌握了。
2. 直击最重要的技术本质,酣畅淋漓。
不用担心被软件的琐碎细节给绊住,每一个故事都会给主人公设置难题,不断地挑战他,等他解决一个,就再设置一个,这样一层层剥下去,最后就把软件的本质给暴露出来。
读完以后让你有种“原来如此”的快感,非常过瘾。
如果没有看过码农翻身1的话,强烈建议半价入手1+2套装,都是半价!

















 1188
1188




 到【灌水乐园】发言
到【灌水乐园】发言







